КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведение сил и моментов сил
|
|
|
|
Сущность метода приведения
Метод приведения в динамике механизмов
Задача построения динамической модели конструкций роботов, систем управления и автоматики возникает на различных этапах проектирования. На начальном этапе, задаваясь ориентировочно массами и жесткостью звеньев, определяют и конструируют передаточные механизмы и выбирают приводы. Затем на этапе компоновки конструкции появляется возможность построить более точно ее динамические и точностные характеристики, выбрать рациональные компоновку и параметры конструкции, не прибегая к ее изготовлению. Трудность решения этой задачи на этапе проектирования состоит в том, что для построения динамической модели необходимо знать размеры звеньев, а они известны лишь ориентировочно. Поэтому на практике целесообразно динамические исследования начинать с простейших моделей, оценивая их пригодность при решении каждой конкретной задачи.
При определении закона движения механизма составляют уравнение движения и решают его относительно искомого кинематического параметра (обобщенной координаты, скорости или ускорения). Для механизма с одной степенью свободы, имеющего одно ведущее звено, решение этой задачи значительно упрощается, если все внешние силы и моменты сил, приложенные к различным звеньям, заменить одной приведенной силой, приложенной к одному звену механизма. При этом массы всех подвижных звеньев заменяют динамически эквивалентной приведенной массой, связанной со звеном приведения.
Задачу о движении системы звеньев для механизмов с одной степенью подвижности сводят с помощью приведенных сил и масс к задаче о движении одного звена или одной точки. В качестве звена приведения принимают обычно ведущее звено механизма.
Приведенной силой Fпр в общем случае называется такая условная сила, элементарная работа которой на возможном перемещении точки приведения равна сумме элементарных работ приводимых сил на соответствующих перемещениях точек приложения этих сил, а п риведенным моментом сил Мпр называется момент приведенной силы Fпр.
Точка приложения приведенной силы называется точкой приведения, а звено, которому принадлежит эта точка, – звеном приведения. Звено и точка приведения, а также направление Fпр могут быть выбраны произвольно. В большинстве случаев Fпр приводится к точке ведущего звена механизма и направляется по касательной к траектории точки приведения.
Для механизмов с одной степенью свободы принцип равенства элементарных работ приводится к равенству мощностей. Приведенная сила, будучи приложенной в точке приведения, развивает мгновенную мощность, равную сумме мгновенных мощностей, развиваемых силами и моментами сил, приложенными к звеньям исследуемого механизма. Приведенный момент, приложенный к звену приведения, развивает мгновенную мощность, равную сумме мгновенных мощностей приводимых сил и моментов. Для механизма с одной степенью свободы получим
 ; (3.44)
; (3.44)
 , (3.45)
, (3.45)
где  – скорость точки приложения
– скорость точки приложения  ;
;  – угол между и , обычно равен нулю; Fk – сила, приложенная к точке k; vk – скорость точки приложения силы Fk;
– угол между и , обычно равен нулю; Fk – сила, приложенная к точке k; vk – скорость точки приложения силы Fk;  – угол между направлениями векторов
– угол между направлениями векторов  и
и  ; Mi – момент сил, приложенных к звену i; ωi – угловая скорость звена; n1 – количество сил, приложенных к точкам звеньев механизма; n2 – количество моментов сил, приложенных к звеньям механизма; ωпр – угловая скорость звена приведения.
; Mi – момент сил, приложенных к звену i; ωi – угловая скорость звена; n1 – количество сил, приложенных к точкам звеньев механизма; n2 – количество моментов сил, приложенных к звеньям механизма; ωпр – угловая скорость звена приведения.
Из равенств (3.44) и (3.45) находим приведенные силы и моменты:
 ; (3.46)
; (3.46)
 . (3.47)
. (3.47)
Из формул (3.46) и (3.47) видно, что Fпр и Мпр зависят не только от величины приводимых сил и моментов, но и от отношения скоростей.
|
|
|
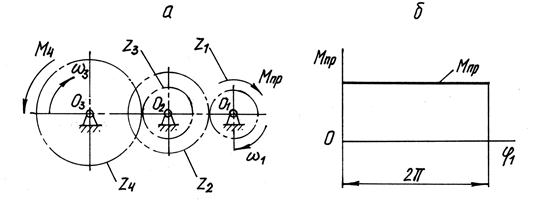
Решение. Согласно условию (3.47) при отсутствии иных, действующих на звенья, сил имеем
 ;
;
 .
.
Здесь i14, i12, i34 – соответственно передаточные отношения между зубчатыми колесами 1 и 4, 1 и 2, 3 и 4. На рис. 3.11, б показан закон изменения Мпр.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1683; Нарушение авторских прав?; Мы поможем в написании вашей работы!
