Если изгибающий момент в поперечном сечении является единственной составляющей внутренних сил, изгиб называется чистым.
Общие понятия о деформации изгиба
Изгиб прямолинейного стержня
Изгиб вызывается (рис. 5.19, а) внешними силами, направленными перпендикулярно продольной оси стержня, а также парами внешних сил, плоскость действия которых проходит через эту ось. При действии такой нагрузки продольная ось стержня искривляется. В поперечных сечениях стержня при изгибе возникают моменты внутренних сил, плоскость действия которых перпендикулярна плоскости сечения, т.е. изгибающие моменты Ми.
Изгиб называют поперечным, если в поперечных сечениях вместе с изгибающим моментом Ми возникают и поперечные силы Q. Поперечный изгиб встречается в реальных условиях нагружения чаще чистого изгиба.
Если плоскость действия изгибающего момента Ми проходит через центр масс поперечного сечения, т.е. через любую центральную ось сечения, изгиб называют простым или плоским, в противном случае изгиб называют косым.
При плоском изгибе продольная ось стержня и после деформации остается в плоскости внешних сил, т.е. представляет плоскую кривую линию. При косом изгибе плоскость деформации не совпадает с плоскостью внешних сил. Косой изгиб относится к виду деформаций, называемых сложной деформацией.
Внутренние силы в поперечных сечениях изгибаемых стержней определяют с помощью метода сечений. Использование уравнений равновесия (5.1) и (5.2) возможно для систем сил, действующих на свободные тела. Стержни, подвергаемые деформации изгиба, в реальных условиях обязательно имеют те или иные опоры, при отсутствии которых изгиб стержня был бы невозможен. Наличие опор (связей) ограничивает движение изгибаемого стержня и делает невозможным использование уравнений равновесия для определения внутренних сил.
Формально несвободные изгибаемые стержни можно считать свободными используя принцип освобождаемости от связей. Согласно ему, любое несвободное тело можно представить свободным, отбросив ограничивающие его движение связи (опоры) и заменив их действие силами реакции этих связей. Уравнения равновесия (5.1) и (5.2) можно использовать для определения внутренних сил в поперечных сечениях изгибаемых стержней при условии, что помимо внешних сил будут учитываться и силы реакций опор. Поэтому прежде чем определить внутренние силы в поперечных сечениях изгибаемых стержней, нужно уметь находить величину и направление реакций опор. Известно, что реакция связи (опоры) направлена всегда в сторону, противоположную той, куда связь не дает перемещаться телу. Если связь препятствует поступательному движению тела, ее реакция – сила; если связь препятствует вращательному движению, ее реакция – момент сил.
г
в
б
а
в
б
в
б
а
Рис. 5.20
а
Рис. 5.21
Рис. 5.19
Различают три основных типа опор стержней при изгибе.
Подвижная шарнирная опора (рис. 5.20, а) не препятствует вращению стержня и его перемещению вдоль опорной поверхности. Реакция опоры проходит через центр шарнира и направлена перпендикулярно опорной плоскости.
Неподвижная шарнирная опора (рис. 5.20, б) допускает вращение стержня и препятствует его поступательному перемещению в любом направлении. Реакция проходит через центр шарнира и может иметь разное направление в зависимости от действия системы внешних сил. Разложим ее на составляющие в плоскости внешних сил, направленные вдоль и перпендикулярно продольной оси стержня.
Жесткая заделка или защемление (рис. 5.20, в) не допускает ни линейных, ни угловых перемещений изгибаемого стержня. Полная реакция опоры состоит из силы, которую раскладываем на две составляющие, направленные вдоль и перпендикулярно продольной оси стержня и момента сил (реактивного момента), составляющие реакции опоры приложены в точке защемления стержня. Стержень, защемленный одним концом и не имеющий других опор, называют консолью. Консолью называют и выступающие за шарнирные опоры части стержня.
Далее, «заменив» опоры силами их реакций, составляют уравнения равновесия для системы сил, действующей на изгибаемый стержень. Независимых уравнений равновесия для плоской системы сил три. Задача статически определима, если число неизвестных составляющих реакций опор не более трех. Это возможно при следующих вариантах крепления изгибаемых стержней: защемление стержня одним концом (контактные пружины) или крепление стержня с помощью подвижной и неподвижной шарнирных опор (валы). При большем количестве неизвестных составляющих реакций применяют иные, не рассматриваемые в пособии, способы решения.
Если при вычислении величину реакции опоры получили отрицательной, со знаком минус, то действительное направление реакции будет противоположно принятому, что обязательно нужно учитывать при определении внутренних сил.
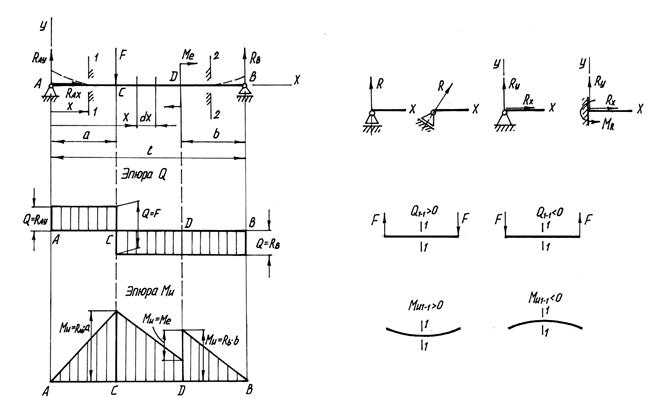
Пример. Определим реакции в опорах А и В изгибаемого стержня, схема нагружения (F, Me) и размеры (a, b, ℓ) которого представлены на рис. 5.19, а. Заменим подвижную опору В реакцией RB, а неподвижную шарнирную опору А – составляющими RAX и RAY. «Свободный» стержень под действием внешних сил и сил реакций опор находится в покое. Отсутствие возможных составляющих плоского движения (поступательные перемещения вдоль осей x и y и вращательное движение в плоскости действия сил, т.е. вокруг оси z) стержня выразим с помощью уравнений равновесия:
. (5.62)
Для действующей системы сил первое из уравнений (5.62) примет вид RAX = 0; второе: RB – F + RAY = 0 и третье: RBℓ – F·a – Me = 0. Из последнего уравнения определим, что RB = (F·a + Me)/ℓ. Далее, подставим величину RB во второе уравнение, определим, что RAY = F – RB = F – (F·a + Me)/ℓ.
studopedia.su - Студопедия (2013 - 2025) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление


 . (5.62)
. (5.62)