КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематическая погрешность многоступенчатой передачи
|
|
|
|
Точность многоступенчатых передач определяется ошибкой положения ведомого звена, зависящей от первичных погрешностей изготовления (погрешность шага, эксцентриситет и т.д.) и сборки (погрешность межосевого расстояния, перекосы осей, погрешность из-за зазоров в опорах т.п.), а также силовых и температурных деформаций деталей.
Так как число возможных причин, вызывающих ошибку положения ведомого звена зубчатой передачи, велико и определение их влияния часто затруднительно, точность нереверсивных передач оценивают практически по комплексному показателю – наибольшей кинематической погрешности Fir', которая при расчетах оценивается по допускаемым отклонениям Fi'.
Исходными параметрами для расчета ошибки ведомого звена являются: модуль m, число зубьев всех зубчатых колес передачи z, степень точности передачи. Модуль и число зубьев определяют из кинематического расчета механизма.
Величину допускаемой кинематической погрешности для всех зубчатых колес определяем, пользуясь зависимостью (14.14) и данными табл. 14.1 и 14.2, она задается в микрометрах по делительной окружности. Выразим кинематическую погрешность колеса в угловых минутах, так как эта размерность лучше характеризует погрешность угла поворота
 , уг. мин, (14.15)
, уг. мин, (14.15)
где d – диаметр делительной окружности; m – модуль в мм; z – число зубьев колеса.
Рассмотрим вначале одноступенчатую зубчатую пару 1, 2. Суммарная ошибка положения (перемещения) δφi∑ ведомого звена 2 будет равна
δφi∑ = δφi(1-2) + δφi2, (14.16)
где δφi(1-2) – величина кинематической погрешности второго звена, вызванная погрешностью звена 1; δφi2 – величина собственной кинематической погрешности колеса 2.
Так как передаточное отношение i12 = ω1/ω2 = δφi1/δφi(1-2), поэтому погрешность δφi1 ведущего колеса 1 вызовет погрешность поворота колеса 2, равную
δφi(1-2) = δφi1/i12, (14.17)
где δφi1 – величина собственной кинематической погрешности колеса 1. Тогда выражение (14.16) представим как
δφi∑ = δφi1/i12 + δφi2,
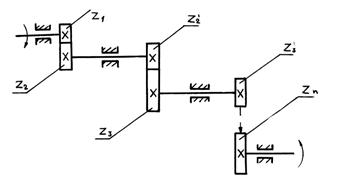
Максимальная кинематическая погрешность многоступенчатого механизма (рис. 14.15) равна сумме приведенных к ведомому звену n кинематических погрешностей всех колес передачи
δφi∑ = δφi1/i1n + δφi2/i2n + … + δφin = 6,88 [  ]. (14.18)
]. (14.18)
Здесь δφi∑ – величина максимальной кинематической погрешности многоступенчатого механизма в угловых минутах, т.е. максимальной ошибки положения (перемещения) ведомого звена n; zk – число зубьев колеса с номером k; Fik' – допускаемые отклонения (шага, профиля зубьев) k-го звена в мкм; ikn – передаточное отношение от k-го колеса к звену n; m – модуль зубчатой передачи в миллиметрах.
|
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1157; Нарушение авторских прав?; Мы поможем в написании вашей работы!