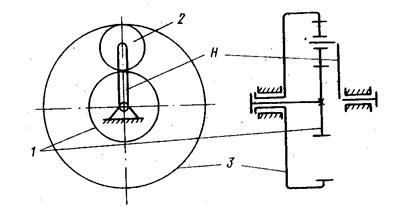
Планетарными называют многозвенные механизмы, в которых обязательно есть зубчатые колеса с движущимися геометрическими осями (рис. 15.1). Эти звенья 2 называют сателлитами; они, как планеты, участвуют в двух вращениях: вокруг своей оси и вокруг неподвижной оси, которую называют центральной. Звено, несущее подвижную ось сателлита, называют водилом Н. Сателлиты входят в зацепление с колесами 1, 3, имеющими общую геометрическую (центральную) ось с водилом, их называют центральными.
Планетарные механизмы, как правило, изготавливаются соосными. Для уменьшения габаритов и улучшения динамики может быть не один, а несколько симметрично расположенных сателлитов. При кинематических расчетах учитывается один сателлит, так как остальные не влияют на характер движения звеньев.
Рис. 15.1
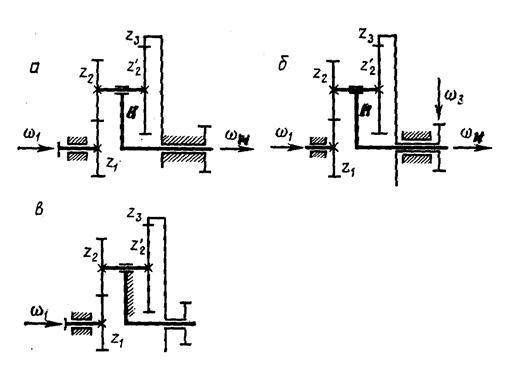
Механизмы с одним закрепленным, называемым опорным, центральным колесом имеют одну степень подвижности (рис. 15.2, а), их называют планетарными редукторами (мультипликаторами). При подвижных центральных колесах (рис. 15.2, б) степень подвижности механизма равна двум, механизм называют дифференциальным. Планетарные механизмы применяют для изменения скорости вращения (воспроизведения заданного передаточного отношения). Дифференциальные механизмы (дифференциалы) применяют для сложения движения двух ведущих звеньев или разложения движения одного ведущего звена на движения двух ведомых звеньев.
ωH
Н
ωH
Н
а
в
б
Рис. 15.2
Планетарный редуктор можно превратить в дифференциал, освободив опорное колесо и сообщив ему вращение. Наоборот, любой дифференциал можно превратить в планетарный редуктор, закрепив центральное колесо. Это свойство обратимости планетарных механизмов позволяет применить одинаковые методы исследования и проектирования для планетарных редукторов и для дифференциалов. При этом каждому элементарному дифференциалу соответствуют два планетарных редуктора, получаемых остановкой его центральных колес.
2΄
2΄
2΄
Основные схемы планетарных редукторов представлены на рис. 15.3. По своим возможностям рассматриваемые схемы делят на две группы механизмов: с однотипным (рис. 15.3, в, г) и разнотипным (рис. 15.3, а, б) зацеплением.
в
а
г
б
в
Рис. 15.3
Механизмы первой группы, т.е. механизмы с двумя внешними или внутренними зацеплениями, работают как понижающие передачи и позволяют получать передаточное отношение до нескольких тысяч. При увеличении передаточного отношения одновременно снижается КПД. Например, при iН1 = 1000 КПД меньше 1%. Используют такие схемы в передачах с приемлемым КПД при iН1 = 30 … 100. В кинематических передачах при использовании этих схем передаточное отношение может достичь 1500…1700. Преимущество из рассматриваемых схем имеют механизмы с двумя внутренними зацеплениями (рис. 15.3, г). При одинаковом передаточном отношении они меньше по габаритам и обладают большими КПД.
Механизмы второй группы, имеющие разнотипное (внутренне и внешнее) зацепление, используют в силовых передачах. Однорядный механизм (с одинарным сателлитом) (см. рис. 15.3, а) применяют при iН1 = 3 … 8, он отличается от рядовых передач с неподвижными геометрическими осями колес малым осевым размером, наименьшая величина которого получается при iН1 £ 4. Механизм с двойным сателлитом (рис. 15.3, б) применяют при iН1 = 3 … 15 и высоком КПД, равном 0,96 … 0,98. Реальные механизмы с подобными схемами имеют несколько симметрично расположенных сателлитов (см. рис. 15.4). Их вводят с целью уменьшения габаритов, снижения усилия в зацеплении, разгрузки подшипников центральных колес и лучшего уравновешивания водила.
Планетарные передачи позволяют получать большие передаточные отношения при малых габаритах и массе механизма, снимать с одной (центральной) оси движения с разными угловыми скоростями. Планетарные механизмы широко используются в шкальных отсчетных устройствах (см. рис. 15.3, в, г), где подвижное центральное колесо связывают со шкалой грубого отсчета, а водило – со шкалой точного отсчета; в механизмах настройки. Недостатками планетарных передач являются повышенное требование к точности изготовления, относительно большой мертвый ход, уменьшение КПД с ростом передаточного отношения.
studopedia.su - Студопедия (2013 - 2025) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление
 Основные схемы планетарных редукторов представлены на рис. 15.3. По своим возможностям рассматриваемые схемы делят на две группы механизмов: с однотипным (рис. 15.3, в, г) и разнотипным (рис. 15.3, а, б) зацеплением.
Основные схемы планетарных редукторов представлены на рис. 15.3. По своим возможностям рассматриваемые схемы делят на две группы механизмов: с однотипным (рис. 15.3, в, г) и разнотипным (рис. 15.3, а, б) зацеплением.