КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выполнять только при снятом напряжении после
|
|
|
|
СБОРКУ И ИЗМЕНЕНИЯ В СХЕМЕ ЛАБОРАТОРНОГО СТЕНДА
НАЖАТИЯ КНОПКИ АК1!
2.2.4. Снятие статических характеристик разомкнутой системы.
Характеристики разомкнутой системы необходимо снимать при коэффициенте передачи регулятора Крс, равном Крс = Uрс/Uзс = 1 (Rос=30 кОм, Сос=0 мкФ).
Для снятия характеристик тиристорного преобразователя ТП1, выход ТП1 необходимо подключить к параллельно соединенным резисторам Rдоб1 и Rдоб2 через шунт ШЗ (работа на активную нагрузку). На вход Uлпу ТП1 подать напряжение +15 В, на вход Uу ТП1 подать регулируемое напряжение с потенциометра Uрег1 положительной полярности. Плавно изменяя величину Uрег1 до достижения напряжения Ud1 = 220 – 230 В, снять показания приборов и занести их в табл. 2.1.
| Рис. 2.1. Принципиальная электрическая схема лабораторного стенда |
Таблица 2.1. Регулировочные характеристики ТП1
| Измерено | Вычислено | Примечание | ||||
| № п/п | Ud1,В | UВЫХДН,В | Uу,В | КП | КДН | |
| V1 | V8 | V7 | КДН = ∆UВЫХДН/ ∆Ud | |||
| Кп = ∆Ud1/∆Uу | ||||||
| … | ||||||
По данным табл. 2.1 построить зависимости Ud1 = f(Uу), Кп = f(Uу), UВЫХДН = f(Ud), постоянную времени ТП1 принять равной Тп = 0,01 с (или задается преподавателем).
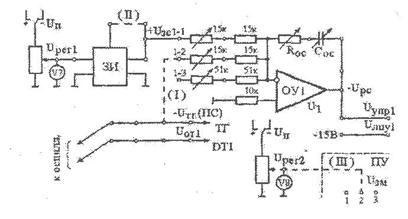
Рис. 2.2. Принципиальная электрическая схема системы управления
Регулировочные характеристики разомкнутой системы снимать при двух значениях якорного тока М1 (Ia = 5 А и Ia = 10 А). Для получения неизменного якорного тока М1, тиристорный преобразователь ТП2 переключателем ПП4 на панели управления переключить в режим РИТ (регулируемый источник тока). Переключатель ПП1 поставить в режим ТГ2, а потенциометр R14 в крайнее левое положение (исключается регулировка момента нагрузки от скорости М1). Переключателем ППЗ и потенциометром R15 преобразователь ТП2 перевести в инверторный режим, а в якорной цепи М1 установить заданный ток. Изменяя Uрег1 от -10 до +10В через 1 В при Ia = const занести показания приборов в табл. 2.2.
Таблица 2.2. Регулировочные характеристики разомкнутой системы
| Измерено | Вычислено | ||||||||
| №п/п | Uз, В | Ud1, В | n, об/мин | UТГ1, В | ω1, 1/с | Rэ, Ом | Rп, Ом | Кос, Вс | Примечание |
| V7 | V1 | V5 | V8 | ||||||
| Ia1 = | |||||||||
| Iв1 = | |||||||||
| Iв2 = | |||||||||
| Кос= ∆UТГ1 /∆ω1 | |||||||||
По данным табл. 2.2 построить зависимости Ud1 = f(Uз), Uтг1 = f(ω1).
Электромеханические и внешние характеристики разомкнутой системы снимать при Uрег1 = Uз = const и Ia1 = var. Изменение нагрузки на валу испытуемого двигателя через нагрузочный агрегат ТП2 – М2 производить с помощью переключателя ППЗ и потенциометра R15. Якорный ток машины М1 изменять от 2 до 10 А через 2 А, далее через 5 А до 25 А. Данные эксперимента занести в табл. 2.3. Количество снимаемых характеристик и величины скоростей холостого хода задаются ведущим преподавателем.
Таблица 2.3. Электромеханические и внешние характеристики
| Измерено | Вычислено | |||||||||
| № п/п | Ud1, В | Ia1, А | Ia2, А | n, об/мин | UДТ1, В | UДТ2, В | ω1, 1/с | КДТ1, В/А | КДТ2, В/А | Примечание |
| V1 | А1 | А2 | V5 | V7 | V8 | |||||
| Uз = | ||||||||||
| Iв1= | ||||||||||
| Iв2= | ||||||||||
| КДТ1 = ∆UДТ1/ ∆Ia1 | ||||||||||
| КДТ2 = ∆UДТ2/ ∆Ia2 | ||||||||||
По данным табл. 2.3 построить зависимости Ud1 = f(Ia1) - все характеристики построить на одном графике, ω1 = f(Ia1) - все характеристики построить на одном графике, Uдт1 = f(Ia1), Uдт2 = f(Ia2).
2.2.5. Исследование переходных процессов при пуске
Исследование переходных процессов проводится с помощью электронного осциллографа, копируя на кальку переходные процессы якорного тока и угловой скорости с экрана осциллографа. Сигналы для осциллографирования берут соответственно с выхода датчика тока ДТ1 (Uдт1) и тахогенератора ТГ1(+Uтг1) (рис. 2.1).
Процесс пуска исследовать при скачкообразном изменении сигнала Uрег1 на входе задатчика интенсивности ЗИ. Тарировку полученных кривых переходного процесса проводить для сигнала скорости по установившимся показаниям прибора V5, а для сигнала тока по максимальному отклонению луча осциллографа и показаниям амперметра А1 при отключенном возбуждении машины М1 и плавном изменении Uрег1 (Iamax <= 30 А).
2.2.6. Исследование переходных процессов при набросе нагрузки
Скачкообразное изменение момента нагрузки осуществляется с помощью перемычки, соединяющей сигнал Uрег2 на панели регуляторов с точками 1, 2, 3 Uзм на панели управления. С помощью сигнала Uрег1 задать скорость вращения электродвигателя М1 200 - 400 об/мин. При этом оборотные пульсации тахогенератора не будут сильно искажать сигнал Uтг1, а низкий начальный уровень сигнала позволит точно определить статическую просадку скорости. Потенциометром R15 и переключателем ППЗ установить начальное значение момента нагрузки, соответствующее якорному току М1 Ia1 = 10 А.
Потенциометром Uрег2 установить ток нагрузки Ia1=20 А. Отключить тумблер питания Uрег2. Включая тумблер Uрег2, сформировать наброс нагрузки, заосциллографировать переходные процессы ω1, Ia1 = f(t) при набросе нагрузки. Тарировку значений скорости и тока провести по установившимся показаниям V5 и А1.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 431; Нарушение авторских прав?; Мы поможем в написании вашей работы!