КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы управления объектами
|
|
|
|
Лекция №2
Общая структура проектируемой системы, её основные элементы и принцип управления в значительной мере определяются свойствами объекта регулирования, условиями работы системы и требованиями, предъявляемыми к её точности. САУ должна решать две основные задачи:
1. Обеспечить требуемое изменение регулируемых величин;
2. Скомпенсировать действие на объект регулирования возмущений.
Преобразуем обобщённую структурную схему САУ к виду

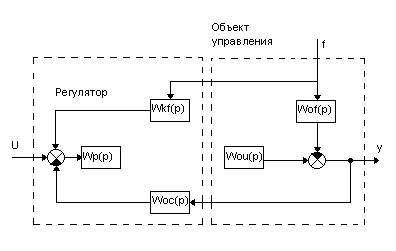
Структурная схема САУ
В общем случае управление регулирующим органом осуществляется в функции ¦, y, x:
 .
.
Это уравнение преобразуем по Лапласу при нулевых начальных условиях, полагая систему линейной:
 (1)
(1)
Уравнение объекта регулирования с одной регулируемой функцией при воздействии на него возмущения имеет вид
 (2)
(2)
Подставив (1) в (2), получим закон функционирования системы:


или

Отсюда

=Wзх(p)X(p)+Wзf(p)F(p), (3)
где Wзх(p) – передаточная функция системы по каналу управления,
Wзf(p) - передаточная функция системы по каналу возмущения.
Для того чтобы регулируемая функция y изменялась по закону x(t) при любых внешних возмущениях, необходимо, чтобы Wзf(p)  0, а Wзx(p) 1 (если неединичная обратная связь, то Wзx(p) 1/Kос) при всех условиях работы системы, т.е. необходимо с помощью сил, создаваемых регулирующим органом, скомпенсировать влияние возмущающих воздействий, действующих на объект регулирования, и приложить к объекту такие силы, которые бы обеспечили требуемое изменение регулируемой величины у(t).
0, а Wзx(p) 1 (если неединичная обратная связь, то Wзx(p) 1/Kос) при всех условиях работы системы, т.е. необходимо с помощью сил, создаваемых регулирующим органом, скомпенсировать влияние возмущающих воздействий, действующих на объект регулирования, и приложить к объекту такие силы, которые бы обеспечили требуемое изменение регулируемой величины у(t).
Из (3) видно, что эти задачи могут быть решены различными способами, так как при этом необходимо выполнить два условия, а в законе управления (1) имеется три варьируемых оператора: Wp(p), Wkf(p), Wос(p). Один из операторов может быть произвольным.
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 492; Нарушение авторских прав?; Мы поможем в написании вашей работы!