КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение задачи стабилизации перевернутого маятника
|
|
|
|
Задача стабилизации перевернутого маятника - это проблема, хорошо известная в сфере автоматики. С учетом простоты интерпретации
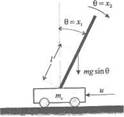
где g = 9,81 м/с2 - гравитационное (земное) ускорение, тс- масса тележки, т - масса маятника, / - половина длины маятника, аи- сила управляющего воздействия. Для моделирования примем тс = 1 кг, т = 0,5 кг и / = 0,5 м. Задача заключается в стабилизации маятника в вертикальном положении, т.е. достижение и удержание состояния, в котором хА = в = 0 и х2 = в = 0.
Реализация системы нечеткого вывода. При наблюдении функционирования ПИД-регулятора, спроектированного для стабилизации маятника, получена обучающая выборка, состоящая из 90 пар данных. Для каждого входа модуля нечеткого управления заданы четыре функции принадлежности, структура которых представлена на рис. 5.23а и 5.236.

|
Формирование набора Подготовка обучаь
 Построение нечеткой системы на основе анализа базы правил Фиксация конфигурации связей
Построение нечеткой системы на основе анализа базы правил Фиксация конфигурации связей
гений параметров a?, tf, cf
| Построение нейронной сел | 1 1 | |
| Обучение нейронной сети | ||
| |уТ( | эчнение функции npnii;i ucai входных нечётких множест] |
[конец
Рис. 5.21. Алгоритм обучения модуля нечеткого управления, о
Рис. 5.22. Перевернутый маятник.
Глава 5 Модули нечетко-нейронного управления
5.3. Модуль управления с нейросетевоп дефуззификациеп

| »2 № \// \ ''Ч / \ / | А А \/\ |
| -90.00 шт> | за оо |
| [X/ | А А \/\ |
Для выхода определены пять функций принадлежности (см. рис. 5.23г). С использованием алгоритма накопления знаний, описанного в разд. 3.10, в ходе обработки обучающей последовательности сформированы 16 нечетких правил, показанных в табличном виде на рис. 5.23в. Они стали исходной точкой для построения первого блока модуля нечеткого управления, реализующего нечеткий вывод (рис. 5.24).
Реализация нейронной сети, выполняющей дефуззификацию. Главная проблема, возникающая при проектировании нейронных сетей, заключается в выборе их структуры, т.е. количества слоев и количества нейронов в каждом слое. Чаще всего количество нейронов в выходном слое предопределяется условиями решаемой задачи (в рассматриваемом случае он состоит из единственного нейрона). Для разрешения большинства проблем оказывается достаточной трехслойная сеть, поэтому остается определить количество нейронов в первых двух слоях. С одной стороны, сеть не должна быть слишком маленькой, так как в этом случае она может не справиться с поставленной задачей. С другой стороны, слишком усложненная структура приведет к излишнему увеличению длительности обучения. Завышение размерности сети имеет и другие негативные последствия, в частности, склонность к неоправданному обобщению знаний.
После проведения многочисленных экспериментов принято решение создавать сеть со структурой 5 + 2 + 1 с сигмоидальной функцией активации. На ее выходе организованы два блока, которые масштабируют выходной сигнал для лучшей адаптации его к решаемой задаче. Полная структура сети, включающая систему вывода, представлена на рис. 5.25.

Рис. 5.23. Нечеткая система, полученная в результате применения алгоритма накопления знаний при обработке численных данных: а) функции принадлежности для угла отклонения маятника; б) функции принадлежности для угловой скорости; в) база нечетких правил; г) функции принадлежности для управляющего воздействия

Рис. 5.24. Структура фрагмента модуля управления, реализующего нечеткий вывод.

|

|
| шронного управления |
5.3. Модуль управления с непросетевой дефуззификацией
Рис. 5.25. Структура модуля управления с нейронной сетью, выполняющей дефуззификацию.

|
| IW.UU 80.00 - | Им | |||
| 60.00 | Обучен | ie нейрон | н и | |
| ^^-""^^ Обуче | ние всей | структуры | ||
| 40.00- | ||||
| 20.00 ~" | L | |||
| 1 i ' i | 1 ' |
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 746; Нарушение авторских прав?; Мы поможем в написании вашей работы!