КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование
|
|
|
|
.
Введение акселератора в контур положительной обратной связи с динамической моделью Кейнса
Исследуем теперь, как изменится поведение экономики в форме модели Кейнса (в приращениях) при ее включении в контур положительной обратной связи с акселератором. Этот контур показан
на рис. 1.15 (η (t) — приращение ВВП, т.е.  ).
).
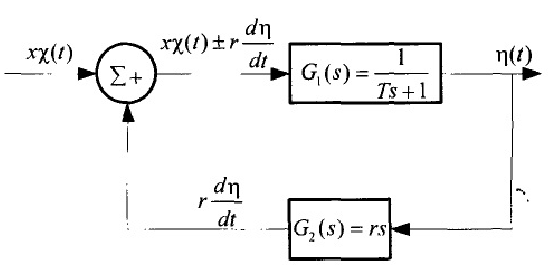
Рис. 1.15. Акселератор в контуре положительной обратной связи с динамической моделью Кейнса
Используя выражения (1.3.3), находим передаточную функцию указанного контура:
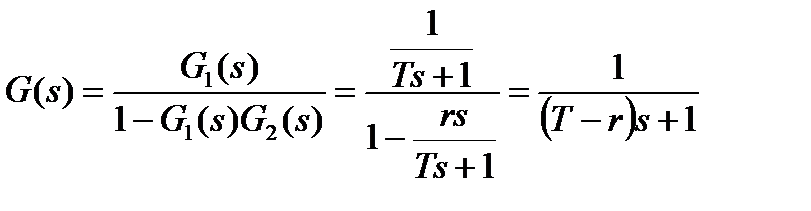 . (1.3.10)
. (1.3.10)
Поскольку образ входа
 ,
,
то с помощью передаточной функции контура определяем образ выхода:
И, наконец, по табл. 1.1 находим прообраз
 ,
,  .
.
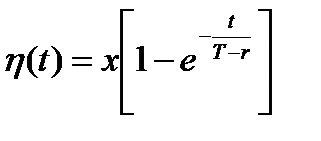
Итак, ВВПведет себя следующим образом:
 ,
,
 . (1.3.12)
. (1.3.12)
Таким образом, введение акселератора в контур обратной связи с динамической моделью Кейнса приводит к тому же значению ВВП в установившемся режиме, что и в отсутствие обратной связи. При этом сходимость к данному значению происходит быстрее, поскольку Т – r < Т Однако ускорение сходимости достигается за счет сокращения потребления в начале переходного периода.
В самом деле, потребление в переходный период без введения акселератора имеет вид:
 ,
,
а с введением акселератора —
 .
.
Поэтому действительно в начале переходного процесса (при  )
)
имеет место сокращение потребления на величину
 ,
,
а при  , напротив, потребление больше
, напротив, потребление больше  .
.
Графики потребления с введением и без введения акселератора показаны на рис. 1.16.

Рис. 1.16. Изменение потребления во времени
Регулирование представляет собой процесс, в ходе которого регулируемый показатель у (выход) сравнивается с входом х.
При наличии отклонения регулируемый орган (регулятор) воздействует, быть может, на регулируемый объект посредством исполнительного органа.
Преимущество регулирования по сравнению с жестким управлением состоит в том, что не обязательно знать вид возмущающих воздействий на объект регулирования, поскольку регулирование осуществляется по отклонению. В этом же и его недостаток, так как регулирование начинается тогда, когда отклонение уже возникло, т.е. без упреждения, а, следовательно, с запозданием.
Для регулирования характерно наличие контура обратной связи, как это показано на рис. 1.17.
Используя правила определения передаточных функций соединений, найдем образ выхода динамической системы, представленной на рис. 1.17 (передаточные функции элементов снабжены индексами этих элементов):
 ,
,
откуда
 (1.3.13)
(1.3.13)
Требования к этой системе следующие: с одной стороны, она должна придерживаться на выходе входа x(t)t а с другой стороны — элиминировать возмущения z(t).
Если z(t) = 0, т.е. возмущений нет, то Z(s) = 0, и из (1.3.13)
 (1.3.14)
(1.3.14)
Следовательно, для отработки входа передаточную функцию регулятора  надо выбирать такой, чтобы Y(s) ≈ X(s), тем самым G(s) ≈1, т.е. регулятор должен обладать большим усилением.
надо выбирать такой, чтобы Y(s) ≈ X(s), тем самым G(s) ≈1, т.е. регулятор должен обладать большим усилением.

Рис. 1.17. Контур обратной связи, осуществляющий регулирование
Если х(t) = 0, т.е. действуют только возмущения, то X(s) = 0, и из (1.3.13)
 (1.3.15)
(1.3.15)
Следовательно, необходимо так выбирать передаточную функцию регулятора, чтобы элиминировать возмущение, т.е. G(s) ≈0, чего можно добиться также с помощью регулятора с большим усилением.
Однако выбор регулятора с большим усилением, как будет показано ниже, приводит к неустойчивости системы
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 392; Нарушение авторских прав?; Мы поможем в написании вашей работы!
