КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Составление плана сил структурной группы 2-3
|
|
|
|
Составим схему нагружения звена 1.
Для этого с плана положений механизма переносим заданное положение кривошипа ОА в масштабе  (рис. 25).
(рис. 25).
2.1. В центре масс S1 прикладываем силу тяжести этого звена G1.
2.2. Силу инерции кривошипа не определяем, так как он уравновешен и его центр масс S1 находится на оси вращения О (аS1 = 0).
2.3. Момент пары сил инерции кривошипа 1  направляем противоположно угловому ускорению
направляем противоположно угловому ускорению  .
.
2.4. Уравновешивающую силу  , прикладываем в точке А и направляем перпендикулярно линии кривошипа ОА (в сторону его угловой скорости
, прикладываем в точке А и направляем перпендикулярно линии кривошипа ОА (в сторону его угловой скорости  .
.
2.5. Реакцию во вращательной паре О (давление стойки О на кривошип 1) раскладываем на две составляющие:
 направлена вдоль оси звена,
направлена вдоль оси звена,  перпендикулярно к оси звена 1 (ОА).
перпендикулярно к оси звена 1 (ОА).
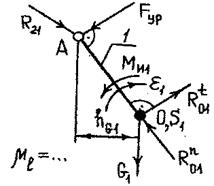
Рис. 25. Схема нагружения звена 1
Определим силы, действующие в кривошипно-ползунном механизме.
Схема нагружения группы 2-3 представлена на рисунке 24.
3.1. Составляем уравнение равновесия всех сил, действующих на структурную группу 2-3:

‖АВ 
3.2. В соответствии с этим уравнением строим план сил в масштабе  (рис. 26).
(рис. 26).
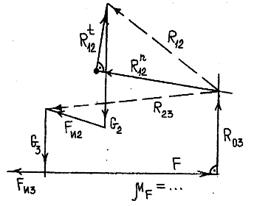
Рис. 26. План сил структурной группы 2-3
3.3. Выбираем произвольную точку, принимая ее за полюс плана сил.
3.4. Через начало вектора  подводим линию действия
подводим линию действия  (параллельно АВ) до пересечения с линией действия силы
(параллельно АВ) до пересечения с линией действия силы  (вертикально), проведенной через конец вектора
(вертикально), проведенной через конец вектора  .
.
Точка пересечения линий действия сил и определяет их величину.
3.5. Соединив начало вектора с концом , получим реакцию  в кинематической паре А.
в кинематической паре А.
3.6. Построив вектор из конца вектора в начало  , замкнем силовой многоугольник ползуна 3 (рис. 26).
, замкнем силовой многоугольник ползуна 3 (рис. 26).

и получим реакцию во внутренней вращательной паре В  (давление шатуна 2 на ползун 3).
(давление шатуна 2 на ползун 3).
3.7. Точкой приложения силы  будет точка D, совпадающая с точкой В, так как силы
будет точка D, совпадающая с точкой В, так как силы  ,
,  и
и  , действующие на ползун 3, проходят через эту точку.
, действующие на ползун 3, проходят через эту точку.
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 2528; Нарушение авторских прав?; Мы поможем в написании вашей работы!