КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порядок выполнения работы. Приборы и оборудование
|
|
|
|
Приборы и оборудование
Программа работы
Цель работы
Лабораторная работа №7
Контрольные вопросы
6.1 Для чего служит задатчик интенсивности?
6.2 Чем реализуется темп нарастания напряжения задатчика?
6.3 Как ограничивается уровень выходного напряжения задатчика?
6.4 Что такое регулятор, и какие функции он выполняет в замкнутой системе управления?
6.5 Какие существуют схемы ограничения выходного сигнала операционного усилителя и принцип их действия?
6.6 Как расчетным путем определить передаточную функцию регулятора?
6.7 Как экспериментально определить параметры П -, И -, ПИ - регуляторов?
6.8 Почему в разомкнутых контурах регулирования не допускается работа аналогового регулятора в интегрирующем режиме?
Федеральное агентство по образованию
ФГОУ СПО «Астраханский колледж вычислительной техники»
Специальность 140613
Исследование системы
“тиристорный преобразователь – двигатель постоянного тока”
по дисциплине “Электрический привод”
АКВТ.140613.ЛР42.0007
| Листов | 7 |
| Составил преподаватель | В.В. Ветлугин | ||
| Рассмотрено на заседании цикловой комиссии специальности 140613 Техническая эксплуатация и обслуживание электрического и электромеханического оборудования в нефтяной и газовой промышленности | ||||||||||
| Протокол № | от | “ | ” | г. | ||||||
| и рекомендовано для студентов | ||||||||||
| Председатель цикловой комиссии | С.В. Расторгуева | |
Содержание
| 1 Цель работы | |
| 2 Программа работы | |
| 3 Приборы и оборудование | |
| 4 Порядок выполнения работы | |
| 5 Содержание отчёта | |
| 6 Контрольные вопросы |
1.1 Исследование рабочих свойств системы «тиристорный преобразователь – двигатель постоянного тока» (ТП-Д), способов регулирования частоты вращения двигателя постоянного тока
2.1 Изучить принципы работы с модулем тиристорного преобразователя (Приложение Б)
2.2 Изучить схему для снятия характеристик системы ТП-Д
2.3 Снять естественные механическую и электромеханическую характеристики двигателя
2.4 Снять искусственные механическую и электромеханическую характеристики ДПТ при изменении напряжения якоря
2.5 Снять регулировочные характеристики системы ТП-Д
2.6 Снять переходные процессы при пуске/останове двигателя
2.7 По полученным данным построить опытные кривые, составить отчет по работе
В лабораторной работе используются следующие модули:
- модуль питания стенда (МПС);
- модуль питания (МП);
- силовой модуль (СМ);
- модуль преобразователя частоты (ПЧ);
- модуль тиристорного преобразователя (ТП);
- модуль регуляторов (МР);
- модуль ввода/вывода (МВВ).
4.1 Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
- согласно указаниям (Приложение Б) перевести модуль тиристорного преобразователя в режим регулирования скорости, установить переключатель SA3 в положение «Авт», SA4 – в положение «НМ», кнопку «Сеть» – в нижнее положение, SA6 – нижнее положение;
- переключатель SA1 модуля ПЧ установить в среднее положение, потенциометр RP1 – на минимум снимаемого напряжения (крайнее положение против часовой стрелки), переключатель SA3 – в нижнее положение;
- потенциометр сигнала задания на модуле регуляторов установить в крайнее положение против часовой стрелки, переключатель SA5 установить в положение «3,5», SA6 установить в положение «0».
Исследуемый двигатель постоянного тока входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М2, нагрузочную машину – асинхронный электродвигатель с фазным ротором – М1, импульсный датчик скорости М3.
Для проведения работы на персональном компьютере должно быть запущено ПО Labdrive и выбрана соответствующая работа.
Схема для исследования системы приведена на рисунке 1.
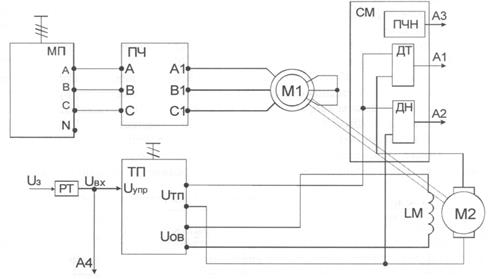
Рисунок 1 – Схема для исследования системы ТП-Д.
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП) через датчики тока и напряжения. Якорная обмотка присоединяется к выходам якорного преобразователя модуля ТП, обмотка возбуждения – к выходам нерегулируемого источника напряжения =220В модуля ТП.
Выход регулятора тока модуля регуляторов подключается ко входу Ч1 модуля ТП, а также ко входу А4 модуля ввода/вывода. На вход регулятора тока подается сигнал задания с потенциометра RP1 модуля.
В качестве нагрузочной машины выступает асинхронный электродвигатель, подключенный к преобразователю частоты ПЧ. Преобразователь частоты запитывается трехфазным напряжением 3х380В от модуля МП.
Выходы датчиков тока и напряжения, а также ПЧН силового модуля подключаются к входам А1, А2, А3 модуля ввода/вывода соответственно.
После сборки схемы необходимо настроить преобразователь частоты на режим регулирования момента (Приложение А).
4.2 Естественная механическая и электромеханическая характеристики системы
Естественные характеристики представляют собой зависимости частоты вращения двигателя от тока якоря (электромеханическая характеристика) и от момента на валу электродвигателя (механическая характеристика): ω = f(IЯ), ω = f(MB) при постоянной величине питающего напряжения UЯ = const.
Для снятия характеристик необходимо:
- включить автоматические выключатели QF1, QF2;
- включением кнопки «Сеть» подать напряжение на ТП;
- подать разрешение на работу ТП (SA6) и установить потенциометром RP1 модуля регуляторов выходное напряжение ТП 200 В;
- разрешить работу ПЧ (SA3) и, выбрав необходимое направление вращения АФДР, задавать потенциометром RP1 модуля ПЧ момент нагрузки. При снятии опыта следить за током якоря ДПТ. Он не должен превышать 1,5 А;
- при проведении опыта желательно зафиксировать несколько точек двигательного и генераторного режимов. Результаты опыта заносить в таблицу 1.
После проведения опыта вывести RP1 модуля ПЧ в крайнее левое положение, переключатель SA1 установить в среднее положение, остановить ДПТ.
Таблица 1 – Данные опыта
| Данные опыта | Расчетные данные | |||||||
| IЯ, A | UЯ, В | IВ, A | n, об/мин | ω, рад/c | РЯ, Вт | Δ PЭЛ, Вт | РВ, Вт | МВ, Н·м |
Расчетные данные.
Частота вращения электродвигателя, рад/с:
 .
.
Мощность на выходе тиристорного преобразователя, Вт:
РЯ = UЯ·IЯ.
Электрические потери в якорной цепи электродвигателя, Вт:
ΔPЭЛ = IЯ2·RЯ,
где RЯ — сопротивление якорной цепи (Приложение В), Ом.
Мощность на валу электродвигателя, Вт:
РВ = РЯ - ΔРЭЛ - ΔРМЕХ,
где ΔРМЕХ – механические потери ДПТ (Приложение В), Вт.
Момент на валу электродвигателя, Н·м
 .
.
По результатам опыта построить характеристики ω = f(IЯ), ω = f(MB), сравнить с аналогичными характеристиками двигателя (Лабораторная работа №1).
4.3 Снятие искусственной характеристики
Искусственные характеристики при пониженном напряжении представляют собой зависимости частоты вращения двигателя от тока якоря (электромеханическая характеристика) и от момента на валу электродвигателя (механическая характеристика): ω = f(IЯ), ω = f(MB) при напряжении якоря, не равном номинальному, отсутствии добавочных сопротивлений в якорной цепи, номинальном потоке возбуждения.
Опыт снимается аналогично предыдущему. При выполнении опыта установить напряжение UТП по указанию преподавателя.
При установке пониженного напряжения зафиксировать точку короткого замыкания. Результаты измерений занести в таблицу 2.
Таблица 2 – Результирующая таблица
| Данные опыта | Расчетные данные | |||||||
| IЯ, A | UЯ, В | IВ, A | n, об/мин | ω, рад/c | РЭЛ, Вт | Δ PЭЛ, Вт | РВ, Вт | МВ, Н∙м |
4.4 Снятие регулировочных характеристик
Регулировочные характеристики представляют собой зависимости напряжения на выходе преобразователя, частоты вращения, мощности на выходе ТП и на валу, КПД электродвигателя от напряжения управления: UЯ, ω, PЭЛ, РВ, η = f(UBX), IЯ = const.
Для снятия данной характеристики необходимо при постоянном значении тока якоря изменять величину сигнала задания, фиксируя показания измерительных приборов.
Опыт проводится на холостом ходу и под нагрузкой, создаваемой преобразователем частоты.
Порядок проведения опыта:
- подать напряжение на тиристорный и частотный преобразователи, запустить ТП, установив выходное напряжение на уровне 200 В;
- с помощью преобразователя частоты установить ток якоря, заданный преподавателем;
- изменяя положение RP1 МР регулировать выходное напряжение преобразователя. После установки определенного напряжения регулировкой потенциометра Rp1 модуля ПЧ добиться заданного тока якоря ДПТ. Результаты занести в таблицу 3.
Таблица 3 – Данные опыта
| Данные опыта | Расчетные данные | |||||||
| UBX, Вт | UЯ, В | IЯ, A | n, об/мин | ω, рад/c | РЯ, Вт | Δ PЭЛ, Вт | РВ, Вт | η |
После проведения опыта необходимо снять нагрузку с электродвигателя переведением тумблера SA1 модуля ПЧ в среднее положение, остановить ДПТ, убрать разрешение на работу тиристорного преобразователя (SA6 в нижнее положение), выключить питание стенда.
По результатам опыта построить регулировочные характеристики системы для двух значений тока якоря, объяснить их отличие.
4.5 Снятие переходных процессов системы
Для снятия переходных процессов пуска/останова необходимо установить масштаб по времени в окне лабораторной работы на уровне 10с и заснять процесс пуска/останова при пониженном напряжении якоря ТП.
Опыт проводится в следующей последовательности:
- включить автоматические выключатели QF1 (МПС), QF2 (МП);
- включением кнопки «Сеть» модуля ТП подать напряжение на преобразователь;
- подав разрешение на работу ТП (SA6), установить частоту вращения на уровне 250...300 об/ми н;
- остановить ДПТ, переведя переключатель SA5 в среднее положение;
- произвести последовательно включение и выключение ТП переведением SA5 из среднего положения в одно из крайних, а затем обратно, одновременно фиксируя переходные процессы на экране компьютера.
По результатам опытов составить отчет по проделанной работе, в котором привести таблицы с опытными и расчетными данными, а также опытные кривые характеристик. Сделать выводы по работе.
5 Содержание отчёта
5.1 Цель работы
5.2 Программа работы
5.3 Приборы и оборудование
5.4 Ход работы
5.5 Выводы
5.6 Контрольные вопросы
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 746; Нарушение авторских прав?; Мы поможем в написании вашей работы!