КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Теорема об изменении количества движения точки
|
|
|
|
Пусть точка М массы m движется под действием сил  (рисунок 3.1). Запишем для данной точки основное уравнение динамики (3.2)
(рисунок 3.1). Запишем для данной точки основное уравнение динамики (3.2)

Так как  ,
,  то основное уравнение динамики запишется в виде:
то основное уравнение динамики запишется в виде:
| (3.13) |
Равенство (3.13) выражает теорему об изменении количества движения точки в дифференциальной форме: производная по времени от количества движения точки равна геометрической сумме всех действующих на точку сил.
Пусть в момент времени t=0 скорость точки  , а в момент времени t скорость точки
, а в момент времени t скорость точки  . Разделяя переменные в равенстве и интегрируя, получим:
. Разделяя переменные в равенстве и интегрируя, получим:
Так как  , геометрической сумме импульсов сил
, геометрической сумме импульсов сил  , то
, то
| (3.14) |
Равенство (3.14) выражает теорему об изменении количества движения точки в конечном виде: изменение количества движения точки за некоторый конечный промежуток времени равно геометрической сумме импульсов всех действующих на точку за тот же промежуток времени в проекциях на оси координат:
 ;
;
 ;
;
 .
.
Теорема об изменении количества движения точки в основном применяется на тех участках траектории движения точки, на которых задано время движения точки или это время нужно определить.
Момент количества движения точки относительно центра и оси. Теорема об изменении момента количества движения точки (теорема моментов)
В некоторых задачах в качестве динамической характеристики движения точки вместо самого вектора количества движения  рассматривают его момент относительно некоторого центра или оси.
рассматривают его момент относительно некоторого центра или оси.
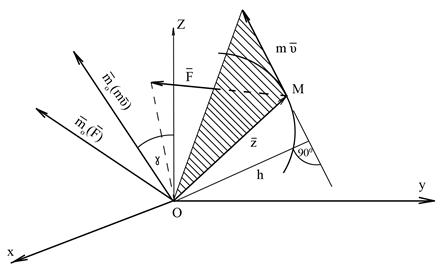
Рис. 3.4
Эти моменты определяются так же, как и моменты силы в статике.
Таким образом, моментом количества движения точки относительно некоторого центра О называется векторная величина  , определяемая равенством:
, определяемая равенством:
| (3.15) |
где r – радиус – вектор движущейся точки М, проведенный из центра О. Вектор направлен перпендикулярно плоскости, проходящей через вектор и центр О, а  (рис. 3.4: для сравнения на нем показан и вектор
(рис. 3.4: для сравнения на нем показан и вектор  , который перпендикулярен плоскости, проходящей через
, который перпендикулярен плоскости, проходящей через  и центр О)
и центр О)
Момент количества движения точки относительно какой-нибудь оси  , проходящей через центр О, будет равен проекции вектора на эту ось:
, проходящей через центр О, будет равен проекции вектора на эту ось:
 ,
,
где  – угол между вектором и осью .
– угол между вектором и осью .
Теорема моментов устанавливает, как изменится со временем вектор . Для доказательства продифференцируем по времени равенство (3.15). Получим: 
Но  как векторное произведение двух параллельных векторов, а
как векторное произведение двух параллельных векторов, а 
Следовательно,  или
или
| (3.16) |
Равенство (3.16) выражает теорему моментов относительно центра: производная по времени от момента количества движения точки, взятого относительно какого-нибудь неподвижного центра равна моменту действующей на точку силы относительно того же центра.
Проецируя равенство (3.16) на какую-нибудь ось , проходящую через центр О, получим:  .
.
Равенство (3.5) выражает теорему моментов относительно оси
Из равенства (3.4) следует, что если  , то
, то 
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 524; Нарушение авторских прав?; Мы поможем в написании вашей работы!