КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия, соотношения, законы 1 страница
|
|
|
|
Динамика
Динамика материальной точки
Импульс (количество движения) – векторная мера механического движения частицы:
 ,
,
где  – скорость частицы,
– скорость частицы,  – “инертная” масса частицы.
– “инертная” масса частицы.
Кинетическая энергия – скалярная мера механического движения:
 .
.
Момент импульса относительно точки – векторная мера вращательного движения:
 ,
,
где  – радиус – вектор частицы относительно точки.
– радиус – вектор частицы относительно точки.
Понятие силы и момента силы относительно точки:
 ,
,

Основное уравнение динамики (второй закон Ньютона):
 ,
,
где  – равнодействующая сил, действующих на частицу.
– равнодействующая сил, действующих на частицу.
Основное уравнение динамики в проекциях на касательную и нормаль к траектории:
 ,
,
 ,
,
где R – радиус кривизны траектории.
Импульс силы, характеризующий действие силы во времени, равен приращению импульса частицы за время действия силы (основной закон динамики в интегральной форме):
 .
.
Работа силы, характеризующая действие силы в пространстве, равна приращению кинетической энергии (теорема о кинетической энергии):
 .
.
Мгновенная мощность силы
 .
.
Средняя мощность (равна отношению работы, совершаемой за промежуток времени Dt, к этому промежутку)
 .
.
Частица в потенциальном поле
Энергия частицы в потенциальном поле сохраняется:
Е=К+П=const,
где П – потенциальная энергия частицы в потенциальном поле.
Потенциальная энергия частицы (тела) в поле тяжести Земли
 ,
,
где m – масса частицы, R – радиус Земли, h – высота над поверхностью Земли,  – ускорение свободного падения у поверхности Земли.
– ускорение свободного падения у поверхности Земли.
Для h << R
П=mgh – mgR.
Работа сил поля
A=DK=- DП.
Связь между силой и потенциальной энергией частицы в поле:
 ,
,  .
.
Уравнение динамики тела переменной массы:
 ,
,
где m – переменная масса тела,  – скорость отделяемого (присоединяемого) вещества относительно рассматриваемого тела,
– скорость отделяемого (присоединяемого) вещества относительно рассматриваемого тела,  – сумма внешних сил.
– сумма внешних сил.
Динамика системы частиц
Импульс системы частиц
 ,
,
где  – масса системы частиц (закон аддитивности массы),
– масса системы частиц (закон аддитивности массы),  – скорость центра инерции системы частиц.
– скорость центра инерции системы частиц.
Уравнение движения центра инерции системы:
 ,
,
где  – результирующая внешних сил,
– результирующая внешних сил,  – центр инерции системы.
– центр инерции системы.
Приращение импульса системы частиц
 .
.
Импульс изолированной системы частиц сохраняется:
Механическая энергия системы
E=K+П,
где  – кинетическая энергия системы,
– кинетическая энергия системы,  – потенциальная энергия системы.
– потенциальная энергия системы.
Изменение механической энергии системы
 ,
,
где Ав – работа внешних сил, Ад – работа внутренних непотенциальных сил.
Механическая энергия изолированной и консервативной системы сохраняется:
Е=К+П=const, или DК=-DП.
Если система находится во внешнем потенциальном поле, то можно ввести понятие потенциальной энергии во внешнем поле и включить ее в механическую энергию системы. При этом изменение механической энергии системы  , где
, где  – работа внешних непотенциальных сил,
– работа внешних непотенциальных сил,  – работа внутренних непотенциальных сил.
– работа внутренних непотенциальных сил.
Момент импульса системы
Изменение момента импульса системы

где  – сумма моментов внешних сил относительно центра инерции.
– сумма моментов внешних сил относительно центра инерции.
Момент импульса изолированной системы частиц сохраняется:  .
.
Законы сил
Закон всемирного тяготения:
 ,
,
где 
 – гравитационная постоянная. Закон справедлив для материальных точек и шаров со сферическим распределением массы, где r – расстояние между точками или центрами шаров.
– гравитационная постоянная. Закон справедлив для материальных точек и шаров со сферическим распределением массы, где r – расстояние между точками или центрами шаров.
Сила тяжести:
 ,
,
где 
Сила упругих деформаций растяжения-сжатия (закон Гука):
 ,
,
где k – коэффициент упругости,  – перемещение конца тела.
– перемещение конца тела.
Максимальная сила трения покоя и сила трения скольжения
 ,
,
где m – коэффициент трения, N – сила реакции поверхности.
Сила сопротивления (u < uзв):
 ,
,
где с – коэффициент сопротивления, зависящий от плотности среды, формы и размеров тела.
Сила вязкого трения:
 ,
,
где  зависит от вязкости среды, формы и размеров тела. Например, для шара (закон Стокса):
зависит от вязкости среды, формы и размеров тела. Например, для шара (закон Стокса):  , где R – радиус шара, h – вязкость среды.
, где R – радиус шара, h – вязкость среды.
Динамика вращательного движения тел вокруг
неподвижной оси
Момент инерции тела относительно оси вращения
 ,
,
где  – момент инерции материальной точки относительно оси вращения (mi – масса материальной точки, ri -расстояние от точки до оси вращения).
– момент инерции материальной точки относительно оси вращения (mi – масса материальной точки, ri -расстояние от точки до оси вращения).
Момент импульса тела относительно оси вращения
 ,
,
где  – момент импульса материальной точки относительно оси вращения.
– момент импульса материальной точки относительно оси вращения.
Момент силы относительно оси вращения
 ,
,
где  – касательная составляющая силы, r – расстояние от точки приложения силы до оси вращения, р – плечо силы.
– касательная составляющая силы, r – расстояние от точки приложения силы до оси вращения, р – плечо силы.
Основной закон динамики вращательного движения тела относительно неподвижной оси в дифференциальной форме:
 ,
,
где  – сумма моментов внешних сил.
– сумма моментов внешних сил.
Основной закон динамики вращательного движения тела относительно неподвижной оси в интегральной форме:
 .
.
Момент импульса замкнутой системы тел, вращающихся вокруг общей оси, сохраняется:
 .
.
Работа момента силы
 .
.
Кинетическая энергия вращения
 .
.
Теорема о кинетической энергии:
 ,
,
где  – работа внешних сил,
– работа внешних сил,  – работа внутренних диссипативных сил.
– работа внутренних диссипативных сил.
Динамика вращательного движения твердого тела относительно неподвижной оси
Момент импульса твердого тела относительно оси вращения
 ,
,
где  – момент инерции твердого тела относительно оси вращения, w – угловая скорость вращения твердого тела.
– момент инерции твердого тела относительно оси вращения, w – угловая скорость вращения твердого тела.
Основной закон динамики вращательного движения твердого тела относительно оси вращения:
 ,
,
где – сумма моментов внешних сил относительно оси вращения.
Теорема Штейнера:
 ,
,
где Jc – момент инерции твердого тела относительно оси, проходящей через центр инерции и параллельной данной оси, m – масса тела, d –расстояние между осями.
Момент инерции сплошного цилиндра радиусом R относительно оси цилиндра
 .
.
Момент инерции тонкого стержня длиной l относительно оси, проходящей через его центр и перпендикулярной к стержню,
 .
.
Момент инерции шара радиусом R относительно оси, проходящей через центр шара,
 .
.
Плоское движение твердого тела
Основные уравнения плоского движения твердого тела:
 ,
,
 ,
,
где m – масса тела, – скорость центра масс, – сумма внешних сил, Jc – момент инерции тела относительно оси, проходящей через центр инерции, М – сумма моментов внешних сил относительно оси, проходящей через центр инерции.
Кинетическая энергия плоского движения твердого тела
 .
.
Механические колебания
Уравнение гармонических колебаний:
 ,
,
где  – циклическая частота (k – коэффициент квазиупругой силы, m – масса тела).
– циклическая частота (k – коэффициент квазиупругой силы, m – масса тела).
Связь циклической частоты с периодом колебаний
 .
.
Период колебаний тела, подвешенного на пружине,
 ,
,
где k – жесткость пружины.
Период колебаний математического маятника
 ,
,
где l – длина маятника, g - ускорение силы тяжести.
Период колебаний физического маятника
 ,
,
где J – момент инерции колеблющегося тела относительно оси колебаний, a – расстояние от оси колебаний до центра тяжести.
Уравнение движения гармонических колебаний
 ,
,
где A – амплитуда, j0 – начальная фаза.
Скорость гармонических колебаний
 ,
,
где  – амплитудное значение скорости.
– амплитудное значение скорости.
Ускорение гармонических колебаний
 ,
,
где  – амплитудное значение ускорения.
– амплитудное значение ускорения.
Уравнение затухающих колебаний
где  коэффициент затухания,
коэффициент затухания,  – циклическая частота собственных колебаний (с – коэффициент пропорциональности в законе вязкого трения
– циклическая частота собственных колебаний (с – коэффициент пропорциональности в законе вязкого трения  , m – масса тела).
, m – масса тела).
Уравнение движения затухающих колебаний (w0 > b):
 ,
,
где  – циклическая частота затухающих колебаний.
– циклическая частота затухающих колебаний.
Декремент затухания
 ,
,
где  – период затухающих колебаний.
– период затухающих колебаний.
Логарифмический декремент затухания
 .
.
Уравнение вынужденных колебаний:
 ,
,
где  – амплитудное значение вынуждающей силы, w – циклическая частота вынуждающей силы.
– амплитудное значение вынуждающей силы, w – циклическая частота вынуждающей силы.
Уравнение движения вынужденных колебаний в установившемся режиме:

где  ,
,  .
.
Резонансная частота
 .
.
Резонансная амплитуда
 .
.
Примеры решения задач
(Поступательное движение твердого тела)
Задача 13. Тело движется по горизонтальной поверхности под действием силы  или
или  (см. рисунок). Сравните ускорения тела а1 и а2, если коэффициент трения скольжения между телом и поверхностью равен m.
(см. рисунок). Сравните ускорения тела а1 и а2, если коэффициент трения скольжения между телом и поверхностью равен m.
 Решение. Правильный ответ а1 > а2. Объяснение связано с пониманием закона силы трения скольжения
Решение. Правильный ответ а1 > а2. Объяснение связано с пониманием закона силы трения скольжения  , где N – величина силы реакции или силы нормального давления. В рассматриваемом случае сила нормального давления меньше силы тяжести на величину проекции силы F на вертикальное направление:
, где N – величина силы реакции или силы нормального давления. В рассматриваемом случае сила нормального давления меньше силы тяжести на величину проекции силы F на вертикальное направление:
N=mg–Fsina,
где a – где угол между силой и горизонтальным направлением. Из рисунка видно, что горизонтальные составляющие сил  и
и  одинаковы, а сила трения Fтр2 больше силы трения Fтр1, так как N2 > N1. Поэтому а1 > а2, как следствие второго закона Ньютона.
одинаковы, а сила трения Fтр2 больше силы трения Fтр1, так как N2 > N1. Поэтому а1 > а2, как следствие второго закона Ньютона.
Исследуем детально движение тела по горизонтальной поверхности под действием силы, направленной под углом a к горизонту.
Тело будет двигаться с ускорением, если горизонтальная составляющая силы больше силы трения скольжения:
Fcosa>m(mg-Fsina).
Откуда для величины силы F находим
 .
.
Ускорение тела равно
 .
.
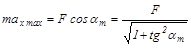
Зависимость ах(tga) имеет максимум при tgam=m:
 .
.
Убедитесь в этом, исследуя зависимость ах(tga) на экстремум.
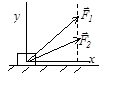
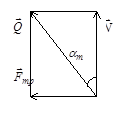 Рассматриваемая задача допускает графическое решение. Тело находится под действием силы , силы тяжести
Рассматриваемая задача допускает графическое решение. Тело находится под действием силы , силы тяжести  , силы реакции
, силы реакции  и силы трения
и силы трения  . Равнодействующую силы представим как сумму
. Равнодействующую силы представим как сумму
 ,
,
где сила  направлена под углом am к вертикали, так как
направлена под углом am к вертикали, так как  в соответствии с законом трения скольжения. Запишем основное уравнение динамики в виде
в соответствии с законом трения скольжения. Запишем основное уравнение динамики в виде
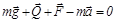 .
.
Представим графически эту сумму векторов.
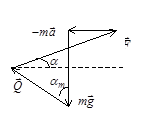 |  |
Если, не меняя модуля силы
, увеличивать угол a, то модуль силы  будет уменьшаться, а модуль вектора
будет уменьшаться, а модуль вектора  увеличивается и принимает максимальное значение при угле a =am, когда сила Q становится равной нулю.
увеличивается и принимает максимальное значение при угле a =am, когда сила Q становится равной нулю.
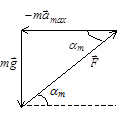
Из векторного треугольника сил находим
 .
.
Откуда получаем
 .
.
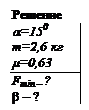
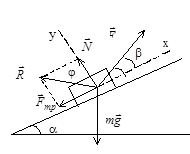
Задача 14. По наклонной плоскости, образующей угол a = 150 с горизонтом, втаскивают с помощью нити груз массой m = 2, 6кг. Коэффициент трения между грузом и плоскостью равен m = 0, 63. Определите минимальную силу Fmin, которую необходимо приложить к нити, чтобы втаскивать груз. Чему равен угол b между нитью и наклонной плоскостью при этом?
 Для решения задачи воспользуемся основным законом динамики:
Для решения задачи воспользуемся основным законом динамики:
 .
.
Представим векторное уравнение в скалярной форме:
 ,
,
 ,
,
где Fтр=mN.
Одно из условий минимальности силы тяги: тело должно двигаться равномерно, не отрываясь от плоскости. Положив ах = ау = 0, для силы тяги находим
 .
.
Сила тяги зависит от угла b. При некотором значении угла bm знаменатель в выражении для силы тяги становится максимальным, а сила тяги при этом принимает минимальное значение. Исследуя знаменатель на экстремум, получаем
bm=arctgm=320.
Подставив bm в выражение для силы тяги, находим
 =19Н.
=19Н.
В частном случае (a=0) (груз находится на горизонтальной поверхности)
 .
.
Самостоятельно исследуйте зависимость bm и Fmin от коэффициента трения m.
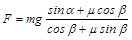
Рассмотрим графическое решение этой задачи. Условие равномерного перемещения груза по наклонной плоскости:
 ,
,
или иначе
 ,
,
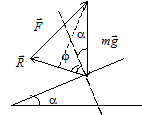 где
где  – равнодействующая сил трения и реакции плоскости. Вектор силы
– равнодействующая сил трения и реакции плоскости. Вектор силы  составляет угол j с нормалью к поверхности, так как между углом j и коэффициентом трения m имеет место связь:
составляет угол j с нормалью к поверхности, так как между углом j и коэффициентом трения m имеет место связь:
 ,
,
в соответствии с законом трения скольжения.
Построим векторный треугольник сил. Вектор силы тяжести направлен вертикально вниз, и длина его известна. Через конец вектора  проведем прямую, составляющую угол a + j с вертикалью. На этой прямой отложим силу , совмещая ее начало с концом вектора . Так как модуль силы
проведем прямую, составляющую угол a + j с вертикалью. На этой прямой отложим силу , совмещая ее начало с концом вектора . Так как модуль силы  нам неизвестен, длину этого вектора выберем произвольно (см. рисунок). В соответствии с векторной суммой сила должна замыкать векторный треугольник сил. Из рисунка видно, что модуль силы
нам неизвестен, длину этого вектора выберем произвольно (см. рисунок). В соответствии с векторной суммой сила должна замыкать векторный треугольник сил. Из рисунка видно, что модуль силы  будет иметь наименьшую величину, если сила перпендикулярна силе . Откуда следует, что сила
будет иметь наименьшую величину, если сила перпендикулярна силе . Откуда следует, что сила  направлена под углом j к наклонной плоскости (убедитесь в этом). Таким образом,
направлена под углом j к наклонной плоскости (убедитесь в этом). Таким образом,
b=j=arctgm,
 .
.
Задача 15. Два тела соскальзывают с одинаковой высоты h по наклонной плоскости с углом наклона к горизонту a без начальной скорости. Сравните скорости тел в конце спуска u1 и u2 и время соскальзывания t1 и t2, если m1 > m2, акоэффициент трения m1 < m2.
Решение. Правильный ответ: u1 > u2, t1 < t2.
Для обоснования воспользуемся методом анализа размерностей. Выделим величины, определяющие физический процесс: h (м) – высота, a (град) – угол наклона плоскости, m – коэффициент трения между телом и плоскостью, m (кг) – масса тела, g (м/с2) – ускорение силы тяжести.
Единственная комбинация физических величин, дающая размерность времени – это  .
.
По методу анализа размерностей можно утверждать, что время спуска равно
 ,
,
где f1 (a, m) – функция a и m.
Время спуска не зависит от массы тела.
При оценке скорости в конце спуска единственно возможной комбинацией физических величин, дающих размерность скорости, является  .
.
Можно утверждать, что скорость в конце спуска
 ,
,
где f2 (a,m)–функция угла a и коэффициента трения m.
Скорость в конце спуска также не зависит от массы. Таким образом, при равенстве коэффициентов трения или отсутствии трения скорости тел и времена их соскальзывания будут одинаковыми. Если m1¹m2, определенного вывода сделать нельзя. Хотя интуиция подсказывает, что при m1<m2 будут выполняться условия u1>u2, t1<t2.
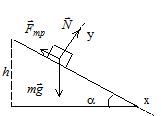 Рассмотрим динамическое решение поставленной проблемы. Проанализируем физическую ситуацию. На тело, находящееся на наклонной плоскости, действуют сила тяжести , сила трения и сила реакции . Сопротивлением воздуха, силой Архимеда можно пренебречь (поясните почему).
Рассмотрим динамическое решение поставленной проблемы. Проанализируем физическую ситуацию. На тело, находящееся на наклонной плоскости, действуют сила тяжести , сила трения и сила реакции . Сопротивлением воздуха, силой Архимеда можно пренебречь (поясните почему).
Если сумма сил
 ,
,
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 898; Нарушение авторских прав?; Мы поможем в написании вашей работы!