КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Случаи приведения плоской системы сил к простейшему виду
|
|
|
|
Рассмотрим некоторые частные случаи предыдущей теоремы.
 1. Если для данной системы сил R = 0, M0 = 0, то она находится в равновесии.
1. Если для данной системы сил R = 0, M0 = 0, то она находится в равновесии.

 2. Если для данной системы сил R = 0, M0 ¹ 0, то она приводится к одной паре с моментом M0 = åm0(Fi). В этом случае величина M0 не зависит от выбора центра О.
2. Если для данной системы сил R = 0, M0 ¹ 0, то она приводится к одной паре с моментом M0 = åm0(Fi). В этом случае величина M0 не зависит от выбора центра О.


 3. Если для данной системы сил R ¹ 0, то она приводится к одной равнодействующей, причем если R ¹ 0 и M0 = 0, то система заменяется одной силой, т.е. равнодействующей R, проходящей через центр О; в случае если R ¹ 0 и M0 ¹ 0, то система заменяется одной силой, проходящей через некоторую точку С, причем ОС = d(OC^R) и d = |M0|/R.
3. Если для данной системы сил R ¹ 0, то она приводится к одной равнодействующей, причем если R ¹ 0 и M0 = 0, то система заменяется одной силой, т.е. равнодействующей R, проходящей через центр О; в случае если R ¹ 0 и M0 ¹ 0, то система заменяется одной силой, проходящей через некоторую точку С, причем ОС = d(OC^R) и d = |M0|/R.
Таким образом, плоская система сил, если она не находится в равновесии, приводится или к одной равнодействующей (когда R ¹ 0) или к одной паре (когда R = 0).
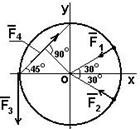
Пример 2.К диску приложены силы:
 (рис. 3.16) привести эту систему сил к простейшему виду.
(рис. 3.16) привести эту систему сил к простейшему виду.
 Решение: выберем систему координат Оху. За центр приведения выберем точку О. Главный вектор R:
Решение: выберем систему координат Оху. За центр приведения выберем точку О. Главный вектор R:
Rx = åFix = -F1cos300 – F2cos300 +F4cos450 = 0; Рис. 3.16
Ry = åFiy = -F1cos600 + F2cos600 – F3 + F4cos450 = 0. Поэтому R = 0.
Главный момент системы М0:
М0: = åm0(Fi) = F3*a – F4*a*sin450 = 0, где а – радиус диска.
Ответ: R = 0; М0 = 0; тело находится в равновесии.
Пример 3.


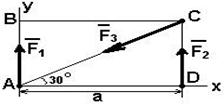
 Привести к простейшему виду систему сил F1, F2, F3, изображенную на рисунке (рис. 3.17). Силы F1 и F2 направлены по противоположным сторонам, а сила F3 – по диагонали прямоугольника ABCD, сторона AD которого равна a. |F1| = |F2| = |F3|/2 = F.
Привести к простейшему виду систему сил F1, F2, F3, изображенную на рисунке (рис. 3.17). Силы F1 и F2 направлены по противоположным сторонам, а сила F3 – по диагонали прямоугольника ABCD, сторона AD которого равна a. |F1| = |F2| = |F3|/2 = F.
Решение: направим оси координат так, как это показано на рисунке. Определим проекции всех сил на оси координат:
 ;
;
 .
.
Модуль главного вектора R равен: ;  .
.
Направляющие косинусы будут:  ;
;  .
.
 | |||||
 Отсюда: (х, R) = 1500; (y, R) = 600.
Отсюда: (х, R) = 1500; (y, R) = 600.
 Определим главный момент системы сил относительно центра приведения А. Тогда
Определим главный момент системы сил относительно центра приведения А. Тогда
mA = mA(F1) + mA(F2) + mA(F3).
 Учитывая, что mA(F1) = mA(F3) = 0, так как направление сил проходит через точку А, тогда
Учитывая, что mA(F1) = mA(F3) = 0, так как направление сил проходит через точку А, тогда
mA = mA(F2) = F*a.
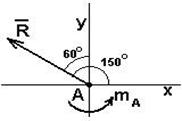
Таким образом система сил приведена к силе R и паре сил с моментом mA, направленном против часовой стрелки (рис. 3.18).
Ответ: R = 2F; (х,^ R) = 1500; (y,^ R) = 600; mA = F*a.
Вопросы для самоконтроля
1. Что такое момент силы относительно центра?
2. Что такое пара сил?
3. Приведение произвольной плоской системы сил к данному центру?
4. Сложение параллельных сил?
Задачи, рекомендуемые для самостоятельного решения: 3.1 – 3.14 [2].
Литература: [1], [3], [4].
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 1383; Нарушение авторских прав?; Мы поможем в написании вашей работы!