КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведение пространственной системы сил к данному центру
|
|
|
|
Аналитические выражения для моментов силы относительно осей координат
 Так как mZ(F) = m0(Fxy) = m0(Fx) + m0(Fy). Это следует из теоремы Вариньона.
Так как mZ(F) = m0(Fxy) = m0(Fx) + m0(Fy). Это следует из теоремы Вариньона.
Момент силы относительно точки О:



 m0(F) = = (y* Fz – z* Fy)*i – (x* Fz – z* Fx)*j – (x* Fy – y* Fx)*k, где
m0(F) = = (y* Fz – z* Fy)*i – (x* Fz – z* Fx)*j – (x* Fy – y* Fx)*k, где
 mx(F) = y*Fz – z*Fy
mx(F) = y*Fz – z*Fy


 my(F) = z*Fx – x*Fz тогда: m0(F) = mx(F)*i + my(F)*j + mz(F)*k
my(F) = z*Fx – x*Fz тогда: m0(F) = mx(F)*i + my(F)*j + mz(F)*k
mz(F) = x*Fy – y*Fx
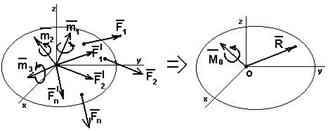 Пусть на тело действует пространственная система сил и необходимо эту систему сил привести к центру О.
Пусть на тело действует пространственная система сил и необходимо эту систему сил привести к центру О.

 Каждую силу приводим к центру О. Для этого параллельным переносом начало вектора каждой силы переносим в центр О и добавляем соответствующий момент (рис. 5.5а):
Каждую силу приводим к центру О. Для этого параллельным переносом начало вектора каждой силы переносим в центр О и добавляем соответствующий момент (рис. 5.5а):

 m1 = m0(F1); m2 = m0(F2); mn = m0(Fn);
m1 = m0(F1); m2 = m0(F2); mn = m0(Fn);
Получаем новую систему сил, приведенных к центру О: F’1, F’2, F’n и моменты m1, m2, m3.
Систему сил заменяем одной силой R, приложенной в той же точке:
 R = å F’n =å Fn.
R = å F’n =å Fn.
Систему моментов сил заменяем одним моментом: M0 = åm0(Fn).
R – главный вектор системы
M0 – главный момент системы, относительно нового центра О (рис. 5.6).
 Таким образом, любая система сил, действующих на твердое тело, при приведении к произвольному центру О заменяется главным вектором системы R, приложенным в центре приведения O и одной парой с моментом M0, равным главному моменту системы относительно центра О.
Таким образом, любая система сил, действующих на твердое тело, при приведении к произвольному центру О заменяется главным вектором системы R, приложенным в центре приведения O и одной парой с моментом M0, равным главному моменту системы относительно центра О.
В аналитической форме:
Rx = å Fnx, Ry = å Fny, Rz = å Fnz.
 Mx = åmx(Fn), My = åmy(Fn), Mz = åmz(Fn).
Mx = åmx(Fn), My = åmy(Fn), Mz = åmz(Fn).
|
|
|
|
|
Дата добавления: 2014-11-26; Просмотров: 484; Нарушение авторских прав?; Мы поможем в написании вашей работы!