КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример решения задачи Т2
|
|
|
|
Ползун D механизма, показанного на рис. 33, совершает возвратно-поступательное движение и нагружен на рабочем ходу постоянной силой Fc полезного сопротивления. На холостом ходу полезное сопротивление отсутствует, но продолжают действовать вредные. Учитывая действие трения в кинематических парах, по коэффициенту полезного действия  механизма произвести определение параметров, согласно требований задачи Т2.
механизма произвести определение параметров, согласно требований задачи Т2.
Исходные данные: Fc =10 кН,  =60 рад/с, =0,7. Размеры звеньев, м: ОА =0,1; АВ =0,2; ВО1 =0,15; СD =0,25; OO1 =0,18; O1C =0,08.
=60 рад/с, =0,7. Размеры звеньев, м: ОА =0,1; АВ =0,2; ВО1 =0,15; СD =0,25; OO1 =0,18; O1C =0,08.
Решение
Определяем крайние положения механизма, соответствующие началу рабочего и холостого хода. Крайнее левое положение ползун D занимает в момент, когда звенья АО и АВ складываются (положение ОА1В1С1D1). Крайнее правое положение он достигает при вытягивании звеньев ОА и АВ в одну линию (положение ОА2В2С2D2). Перемещение ведущего звена из положения ОА1 в положение ОА2 с поворотом на угол  по направлению – есть рабочий ход, а из положения ОА2 в ОА1 с поворотом на угол
по направлению – есть рабочий ход, а из положения ОА2 в ОА1 с поворотом на угол  – холостой ход. За один ход ползун перемещается на величину s. Для решения задачи по всем пунктам необходимо определить значения , , s.
– холостой ход. За один ход ползун перемещается на величину s. Для решения задачи по всем пунктам необходимо определить значения , , s.
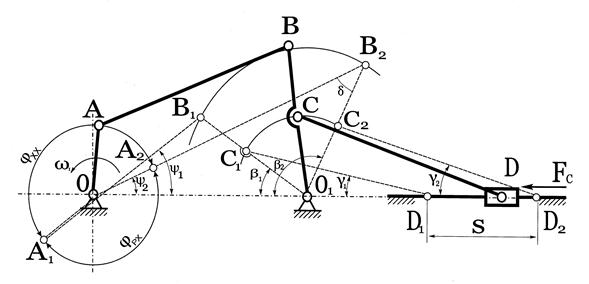
Рис. 33
Наиболее простой путь установления данных параметров – графическое построение механизма в масштабе в крайних его положениях с последующим измерением образующихся размеров с чертежа. Пример такого построения показан на рис. 33. Однако этот метод приближенный и его точность зависит от выбранного масштаба. Аналитический метод исключает этот недостаток. Рассмотрим на примере подробнее.
Определяем углы  и
и  , которые фиксируют положение звена АО в начале и конце рабочего хода. Из
, которые фиксируют положение звена АО в начале и конце рабочего хода. Из  , где ОВ1=(АВ-ОА)=0,1; ОО1=0,1; О1В1=0,15 по теореме косинусов получаем
, где ОВ1=(АВ-ОА)=0,1; ОО1=0,1; О1В1=0,15 по теореме косинусов получаем
 .
.
Отсюда
 .
.
Из  аналогично определяем угол . Если ОВ2=(АВ+ОА), то
аналогично определяем угол . Если ОВ2=(АВ+ОА), то
 .
.
Следовательно (рис. 33), 
 .
.
Для определения хода ползуна s рассмотрим звенья О1С и СD в крайних положениях с образованием  и
и  , зафиксированных углами
, зафиксированных углами  и
и  , и углами
, и углами  и
и  . В треугольнике
. В треугольнике  по теореме синусов определяем угол
по теореме синусов определяем угол  . Из соотношения
. Из соотношения  получаем
получаем  =33,750. Аналогично для треугольника получаем
=33,750. Аналогично для треугольника получаем  , откуда следует
, откуда следует  и далее
и далее  . Таким образом, коромысло О1В в крайних положениях фиксируется углами
. Таким образом, коромысло О1В в крайних положениях фиксируется углами  и
и  .
.
Крайние положения шатуна СD определяются треугольниками и , из которых так же по теореме синусов находим  и
и  .
.
Ход ползуна s согласно рис. 33 вычисляется как  , где
, где
 м.
м.
Следовательно,  м.
м.
Итак, для заданного механизма были получены исходные данные для дальнейших расчетов по п.1 … п.4 в соответствии с требованиями задачи Т2:
– угол поворота ведущего звена (рабочий ход)  рад.;
рад.;
– для холостого хода –  рад.;
рад.;
– ход ползуна – s =0,115 м.
Далее расчет проводим согласно пунктам задания Т2.
1. Определяем движущий момент Тд, постоянный по величине, который нужно приложить к ведущему звену при установившемся движении с циклом, состоящим из рабочего и холостого ходов.
Коэффициент полезного действия (к.п.д.) определяется отношением работы (Апс) сил полезного сопротивления к затраченной работе (Азатр) или  . Работу сил полезного сопротивления находим как
. Работу сил полезного сопротивления находим как  , затраченную работу -
, затраченную работу -  , а за цикл -
, а за цикл -  . Следовательно, из этих зависимостей получаем
. Следовательно, из этих зависимостей получаем
 кНм,
кНм,
Азатр =1,64 кДж,
Апс =1,15 кДж.
2. Для определения работы сил вредного сопротивления на рабочем (Авс(рх )) и холостом (Авс(хх )) ходах строим диаграмму зависимости приведенных средних момента (Т) за один цикл работы механизма, т.е.  .
.
Рис. 34
Определяем работу сил вредных сопротивлений (сил трения)  за полный цикл работы механизма
за полный цикл работы механизма
 кДж.
кДж.
В свою очередь Авс складывается из работ сил сопротивления за рабочей ход – Авс(рх) и холостой ход – Авс(хх)
Авс= Авс(рх)+ Авс(хх)
или через моменты сил сопротивления, действующих на рабочем ходу – Твс(рх) и холостом ходу – Твс(хх)
 .
.
Учитывая (согласно условию), что на рабочем ходу силы сопротивления в три раза больше, чем на холостом, получим

 .
.
Отсюда
 кНм,
кНм,
 кНм,
кНм,
 кДж,
кДж,
 кДж.
кДж.
3. Определяем изменение кинетической энергии механизма за время рабочего хода. Согласно теореме об изменении кинетической энергии механических систем
 ,
,
где  – изменение кинетической энергии за период рабочего хода;
– изменение кинетической энергии за период рабочего хода;  ,
,  – кинетическая энергия механизма в начале и в конце рабочего хода соответственно;
– кинетическая энергия механизма в начале и в конце рабочего хода соответственно;  – сумма работ внешних и внутренних сил, которая складывается в данном случае из работ сил полезного сопротивлении
– сумма работ внешних и внутренних сил, которая складывается в данном случае из работ сил полезного сопротивлении  и сил вредного сопротивления
и сил вредного сопротивления  . Таким образом,
. Таким образом,
 кДж.
кДж.
Аналогично устанавливается изменение кинетической энергии при холостом ходе  кДж.
кДж.
4. Мощность, требуемая от привода при вращении входного звена ОА со средней скоростью , определяется как
 кВт.
кВт.
Для определения средней мощности полезного сопротивления найдем приведенный к ведущему звену момент сил полезного сопротивления 
 кНм.
кНм.
Тогда средняя мощность полезного сопротивления за цикл составит
 кВт.
кВт.
Отношение  учитывает продолжительность действия момента за цикл. Средняя мощность сил вредного сопротивления определится как
учитывает продолжительность действия момента за цикл. Средняя мощность сил вредного сопротивления определится как  кВт.
кВт.
Достоверность полученных результатов можно проверить, определив к.п.д. механизьма –
 ,
,
что соответствует первоначальному условию задачи.
2.5. Литература по курсу «Теория механизмов и машин»
1. Теория механизмов и механика машин: учебник для втузов / К.В. Фролов, С.А. Попов, А.К. Мусатов [и др.]; под ред. К.В. Фролова. – 3-е изд., стер. – Москва: Высш. шк., 2001. – 496 с.
2. Левитский Н.И. Теория механизмов и машин / Н.И. Левитский. – Москва: Наука, 1979. – 576 с.
3. Гавриленко В.А. Теория механизмов / В.А. Гавриленко. – Москва: Высш. шк., 1973. – 511 с.
4. Артоболевский И.И. Теория механизмов и машин / И.И. Артоболевский. – Москва: Высш. шк., 1988. – 640 с.
5. Пузырев Н.М. Теория механизмов и машин / Н.М. Пузырев. – Тверь: ТГТУ, 2006. – 120 с.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 2483; Нарушение авторских прав?; Мы поможем в написании вашей работы!