КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Краткие теоретические сведения, необходимые для расчета регуляторов
|
|
|
|
Исследование динамических характеристик двухконтурной САУ скоростью ДПТ
Пример переходных процессовв окончательно настроенной системе
На Рис. 9.3‑2 представлена структурная схема двухконтурной САУ скоростью ДПТ. Схема не учитывает инерционность преобразователя напряжения.
Рис. 9.3‑2 Структурная схема двухконтурной САУ
На схеме:
Uзс – напряжение задания на скорость;
РС – регулятор скорости;
Wрс – передаточная функция регулятора скорости;
РТ – регулятор тока;
Wрт – передаточная функция регулятора тока;
Пр – преобразователь напряжения;
Кпр – коэффициент усиления преобразователя напряжения;
Д – двигатель постоянного тока;
i – ток якоря двигателя;
С – коэффициент электромеханического преобразования двигателя;
Rя – активное сопротивление обмотки якоря двигателя;
Тя – электромагнитная постоянная обмотки якоря двигателя;
Тм – полнаямеханическая постоянная двигателя;
Кот – коэффициент обратной связи по току;
Кос – коэффициент обратной связи по скорости;
ω – угловая скорость вращения двигателя.
Преобразовав схему на Рис. 9.3‑2 и принимая Тя<<Тм получим схему, показанную на Рис. 9.3‑3.
Рис. 9.3‑3 Структурная схема упрощенной двухконтурной САУ
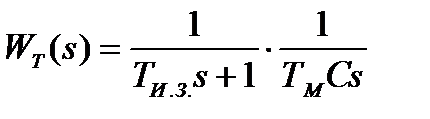
Передаточная функция разомкнутого внутреннего контура (контура тока) без регулятора представляет собой инерционное звено:
 (1)
(1)
Для оптимизации этого звена охватим его обратной связью и введем в прямой канал управления ПИ-регулятор с передаточной функцией:
 (2)
(2)
где:
 – постоянная времени якорной цепи (в данной Лаб. работе определяется экспериментально и может быть отключена ключом К3);
– постоянная времени якорной цепи (в данной Лаб. работе определяется экспериментально и может быть отключена ключом К3);
 – заданная желаемая постоянная времени контура тока. Рекомендуется брать порядка (2-3)
– заданная желаемая постоянная времени контура тока. Рекомендуется брать порядка (2-3)  .
.
 – коэффициент преобразователя (
– коэффициент преобразователя ( = 1.2)
= 1.2)
Из формулы (2) получаются выражения для регуляторов контура тока.
 – пропорциональный коэффициент ПИ регулятора тока;
– пропорциональный коэффициент ПИ регулятора тока;
 (3)
(3)
 – интегральный коэффициент ПИ регулятора тока.
– интегральный коэффициент ПИ регулятора тока.
(4)
После настройки регуляторов замкнутый контур тока с ПИ-регулятором будет иметь передаточную функцию:
 (5)
(5)
Передаточная функция разомкнутого внешнего контура (контура скорости) без регулятора после оптимизации контура тока будет:
 (6)
(6)
Для оптимизации этого звена охватим его обратной связью и введем в прямой канал управления П-регулятор с передаточной функцией:
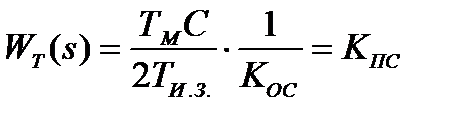 (7)
(7)
где:
 – полная механическая постоянная времени, была определена экспериментально в лабораторной работе 2.1 (для системы с маховиком и без маховика);
– полная механическая постоянная времени, была определена экспериментально в лабораторной работе 2.1 (для системы с маховиком и без маховика);
Отметим, что все рассчитанные настройки регуляторов не являются окончательными. Обычно для получения окончательной настройки расчетные значения берутся в качестве базовых, и на основании последующих испытаний производится корректировка.
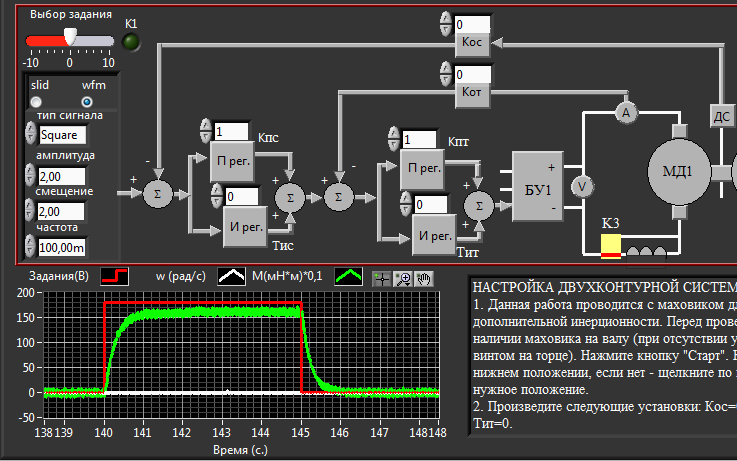
По методике лабораторной работы 9.2.1 снимем реакцию разомкнутой системы на скачок задания.

Пример скриншота реакции разомкнутой системы на скачок задания
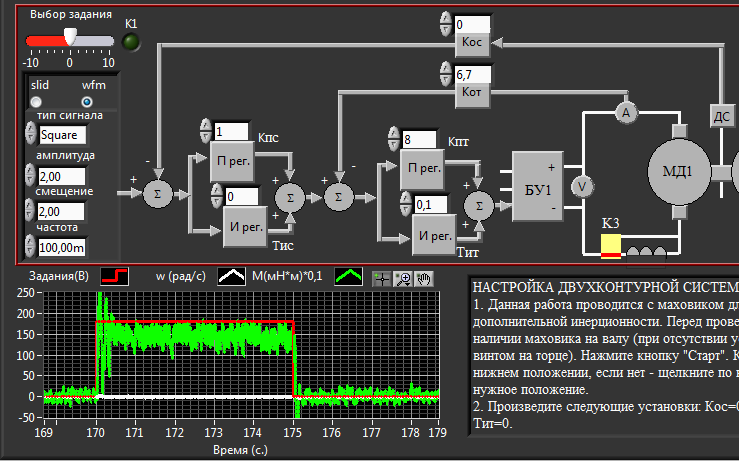
Снимем реакцию на скачок внутреннего контура. Ротор должен быть неподвижен, для этого нужно зафиксировать маховик.
Пример скриншота реакции внутреннего контура на скачок задания
По методике лабораторной работы 2.1 рассчитаем постоянную времени якоря  по тому же принципу, как и
по тому же принципу, как и  .
.
Рассчитаем коэффициенты пропорционально-интегрального (ПИ) регулятора тока  и
и 
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 503; Нарушение авторских прав?; Мы поможем в написании вашей работы!