КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
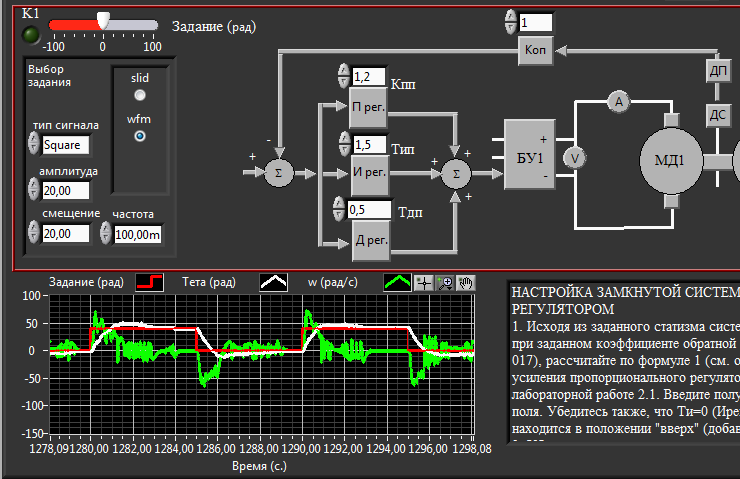
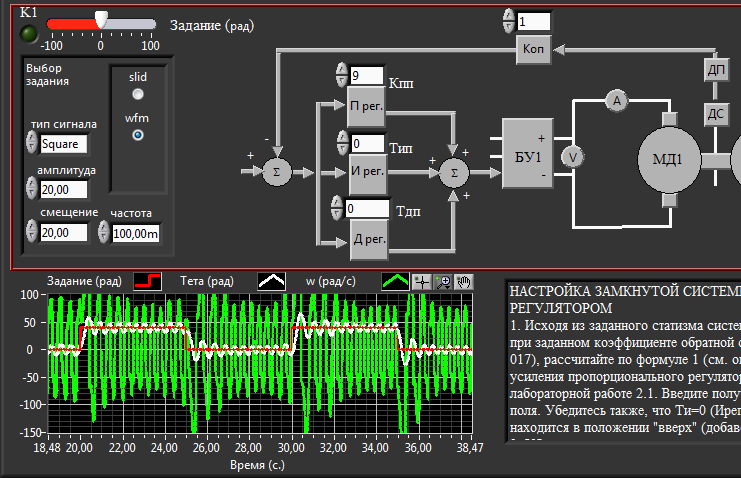
Пример окончательной настройки с маховиком
|
|
|
|
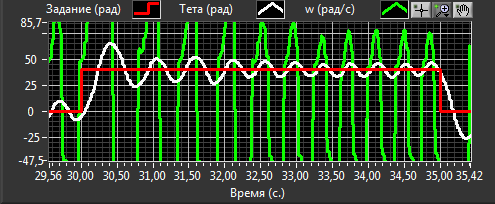
Пример окончательной настройки без маховика
Вариант с маховиком
Фиксируем  .Принимаем
.Принимаем 
Фиксируем  .Принимаем
.Принимаем 
Фиксируем  .Принимаем
.Принимаем 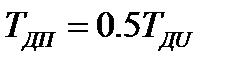
Для оптимизации данной настройки можно уменьшить  .
.
Настройка ПИД-регулятора методом Циглера-Николса
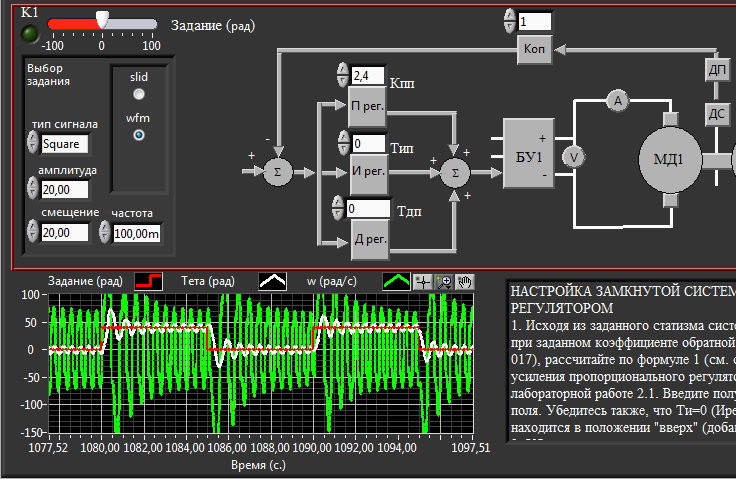
Для настройки данным методом необходимо вначале для замкнутой системы при разомкнутых И- и Д- регуляторах определить граничное значение Кu, соответствующее Кп, при котором начинаются автоколебания, а также период этих автоколебаний – Тu.
Затем по таблице, исходя из типа выбранного регулятора, рассчитываются соответствующие коэффициенты.
В Табл.2 приведены формулы расчета ПИД регулятора для случаяследующей передаточной функции:
 (5)
(5)
Табл.2
| N | Тип регулятора | 
| 
| 
|
| П | 
| - | - | |
| ПИ | 
| 
| - | |
| ПИД | 
| 
| 
|
Если регулятор имеет вид, представленный ниже:
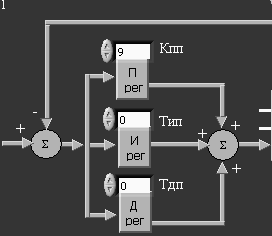
то коэффициенты пересчитываются следующим образом:
 ;
;  ;
;  (6)
(6)
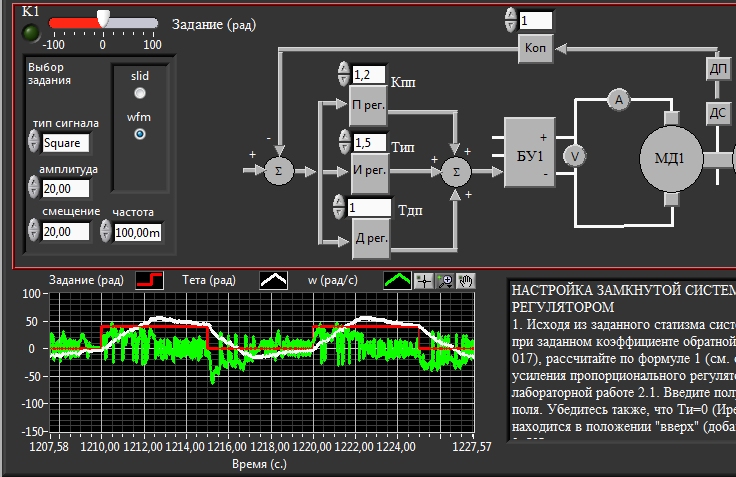
Система с маховиком
Фиксируем . Увеличиваем масштаб графика и определяем период автоколебаний
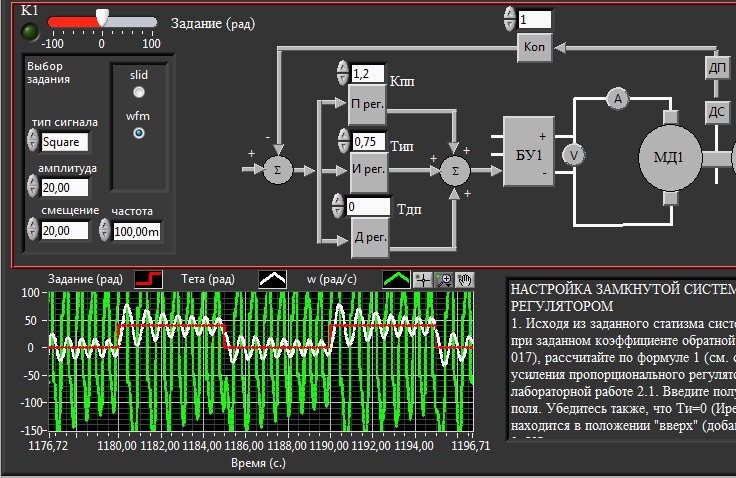
Рассчитываем значения регуляторов  ,
,  и
и 

|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 421; Нарушение авторских прав?; Мы поможем в написании вашей работы!