КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выполнение лабораторной работы
|
|
|
|
План работы
Пример окончательной настройки
Цель задания
Приобрести навыки настройки одноконтурной замкнутой системы с различными регуляторами (П, ПИ, ПИД)
Исследовать зависимость качества переходных процессов в замкнутой системе от параметров и настроек системы.
Результатом работы должны быть:
- полученные расчётным или экспериментальным путем коэффициенты настроек регуляторов;
- скриншоты переходных процессов реакции системы с П, ПИ и ПИД регуляторами (с маховиком и без него) на скачок задания;
- качественный анализ полученных переходных процессов
- скриншоты переходных процессов реакции системы с П, ПИ и ПИД регуляторами (с маховиком и без него) на скачок нагрузки.
1. Для системы без маховика рассчитайте и настройте П-регулятор. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
2. Для системы с маховиком рассчитайте и настройте П-регулятор. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
3. Для системы без маховика рассчитайте и настройте ПИ-регулятор. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
4. Для системы с маховиком рассчитайте и настройте ПИ-регулятор. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
5. Для системы без маховика введите в цепь якоря дополнительную инерционность. Проведите поочередную настройку ПИД регулятора. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
6. Для системы с маховиком введите в цепь якоря дополнительную инерционность. Проведите настройку ПИД регулятора методом Циглера-Николса. Проверьте систему на наброс задания и нагрузки. Оцените качество переходных процессов.
Для выполнения лабораторной работы необходимо выбрать в меню строку “ Исследование динамических характеристик одноконтурной САУ скоростью ДПТ ”. В правом нижнем углу открывшейся лицевой панели будут представлены подробные инструкции по выполнению.
Данные, необходимые для проведения лабораторной работы:
 – активное сопротивление якорной цепи (получено в лабораторной работе 9.1.1);
– активное сопротивление якорной цепи (получено в лабораторной работе 9.1.1);
 – момент сопротивления на валу двигателя (примем
– момент сопротивления на валу двигателя (примем  мН*м);
мН*м);
 - коэффициент электромеханического преобразования (получен в лабораторной работе 1.2;
- коэффициент электромеханического преобразования (получен в лабораторной работе 1.2;
 - коэффициент усиления преобразователя (
- коэффициент усиления преобразователя ( );
);
 – коэффициент усиления пропорционального регулятора;
– коэффициент усиления пропорционального регулятора;
 – напряжение задания (
– напряжение задания ( В);
В);
 – полнаямеханическая постоянная времени системы без маховика (получена в лабораторной работе 2.1);
– полнаямеханическая постоянная времени системы без маховика (получена в лабораторной работе 2.1);
 – полнаямеханическая постоянная времени системы с маховиком (получена в лабораторной работе 2.1);
– полнаямеханическая постоянная времени системы с маховиком (получена в лабораторной работе 2.1);
 - задержка системы (получена в лабораторной работе 2.1);
- задержка системы (получена в лабораторной работе 2.1);
 - электрическая постоянная времени системы:при отключенной дополнительной индуктивности (ключ К3 в верхнем положении)
- электрическая постоянная времени системы:при отключенной дополнительной индуктивности (ключ К3 в верхнем положении)  для определения берется из таблицы с данными двигателей в лабораторной работе 2.1; при включенной дополнительной индуктивности (ключ К3 в нижнем положении)
для определения берется из таблицы с данными двигателей в лабораторной работе 2.1; при включенной дополнительной индуктивности (ключ К3 в нижнем положении)  экспериментально определяется в процессе лабораторной работы.
экспериментально определяется в процессе лабораторной работы.
Чтобы начать работу, нажмите кнопку “Старт”.
НАСТРОЙКА ЗАМКНУТОЙ СИСТЕМЫ С ПРОПОРЦИОНАЛЬНЫМ РЕГУЛЯТОРОМ.
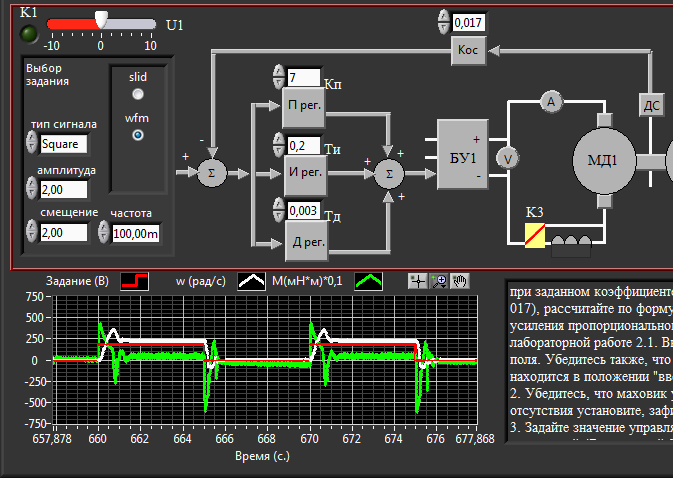
1 Исходя из заданного статизма системы (рекомендуемое значение 10%) при заданном коэффициенте обратной связи (рекомендуемое значение  ),используя данные, полученные в лабораторной работе 2.1, рассчитайте по формуле (4) требуемый коэффициент усиления пропорционального регулятора. Введите полученные данные в соответствующие поля. Убедитесь также, что
),используя данные, полученные в лабораторной работе 2.1, рассчитайте по формуле (4) требуемый коэффициент усиления пропорционального регулятора. Введите полученные данные в соответствующие поля. Убедитесь также, что  (Ирег) и
(Ирег) и  (Дрег). Ключ К3 находится в положении "вверх" (добавочная индуктивность отключена).
(Дрег). Ключ К3 находится в положении "вверх" (добавочная индуктивность отключена).
2 Убедитесь, что маховик установлен на вал двигателя, и в случае его отсутствия - установите, зафиксировав винтом на торце.
3 Задайте значение управляющего периодического сигнала - меандр с размахом0-4В и частотой 0.1Гц.Для этого в окне "Выбор задания":
· щелкните по радио-кнопке “waveform”
· в поле "тип сигнала" выберите "Square"
· в поле "частота" введите 0.1
· в поля "амплитуда" и "смещение" введите 2
4 Нажмите кнопку "Продолжить". Щелчком по кнопке К1 активизируйте управление МД1. МД2 остается заблокированным.
5 Система начнет отработку периодического скачкообразного сигнала задания. Дождитесь стабильного циклического повторения картинки переходного процесса и нажмите кнопку "Пауза".
6 Пользуясь методикой, описанной в разделе “Пример” главы 8.6Запуск программы и проведение лабораторных работ, определите время переходного процесса и перерегулирование.
7 Проверьте работу системы при изменении нагрузки. Для этого:
· в окне "Выбор задания"щелкните по радио-кнопке “slider”
· установите ползунок U1 в положение 4
· в окне “Выбор нагрузки” щелкните по радио-кнопке “waveform”
· в поле "тип сигнала" выберите "Square"
· в поле "частота" введите 0.1
· в поля "амплитуда" и "смещение" введите 2
8 Нажмите кнопку "Продолжить", и щелчком по кнопкамК1 и К2 разблокируйте МД1 иМД2.
9 Система начнет отработку периодического скачкообразного сигнала задания. Дождитесь стабильного циклического повторения картинки переходного процесса и нажмите кнопку "Пауза".
10 Пользуясь методикой, описанной в разделе “Пример” главы 8.6Запуск программы и проведение лабораторных работ, определите время переходного процесса, перерегулирование и просадку по скорости (разницу между заданной и полученной скоростью в процентном отношении к заданной скорости).
11 Снимите маховик с вала и повторите пп. 3-10.
НАСТРОЙКА ЗАМКНУТОЙ СИСТЕМЫ С ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫМ РЕГУЛЯТОРОМ
12 Задав минимальное время запаздывания  (рекомендуемое значение
(рекомендуемое значение  ) и коэффициент обратной связи (рекомендуемое значение
) и коэффициент обратной связи (рекомендуемое значение  ). Пользуясь данными, полученными в лабораторной работе 2.1, рассчитайте по формулам(6) требуемые коэффициенты
). Пользуясь данными, полученными в лабораторной работе 2.1, рассчитайте по формулам(6) требуемые коэффициенты  и
и  . Введите полученные данные в соответствующие поля. Убедитесь также, что
. Введите полученные данные в соответствующие поля. Убедитесь также, что  (Дрег).
(Дрег).
13 Выполните пп. 4-10с маховиком и без него.
Пользуясь методикой, описанной в разделе “Пример” главы 8.6Запуск программы и проведение лабораторных работ, определите время переходного процесса и перерегулирование.
НАСТРОЙКА ЗАМКНУТОЙ СИСТЕМЫ С ПРОПОРЦИОНАЛЬНО - ИНТЕГРАЛЬНО - ДИФФЕРЕНЦИАЛЬНЫМ РЕГУЛЯТОРОМ
14 Проведите поочередно настройку регуляторов для системы с маховиком. Установите начальные значения:  ;
;  (Прег);
(Прег);  (Ирег), и (Дрег).
(Ирег), и (Дрег).
15 Выполните пп.3-4. Не останавливая процесс, постепенно увеличивайте Кп. Для этого вводите все новые значения в поле  и нажимайте на клавиатуре "Ввод" (рекомендуемый шаг 1). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания, и запишите значение граничного коэффициента
и нажимайте на клавиатуре "Ввод" (рекомендуемый шаг 1). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания, и запишите значение граничного коэффициента  . Введите значение
. Введите значение  в поле
в поле 
16 Не останавливая процесс и не меняя , введите начальное значение  и постепенно уменьшайте его. Для этого вводите все новые значения в окно
и постепенно уменьшайте его. Для этого вводите все новые значения в окно  , нажимая на клавиатуре "Ввод" (рекомендуемый шаг 0,1). Уменьшайте до тех пор, пока не начнутся устойчивые автоколебания.Запишите значение граничного коэффициента
, нажимая на клавиатуре "Ввод" (рекомендуемый шаг 0,1). Уменьшайте до тех пор, пока не начнутся устойчивые автоколебания.Запишите значение граничного коэффициента  . Введите значение
. Введите значение  в поле .
в поле .
17 Не останавливая процесс и не меняя и  , введите начальное значение
, введите начальное значение  и постепенно увеличивайте его. Для этого вводите все новые значения в поле
и постепенно увеличивайте его. Для этого вводите все новые значения в поле  , нажимая на клавиатуре "Ввод" (рекомендуемый шаг 0,001). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания.Запишите значение граничного коэффициента
, нажимая на клавиатуре "Ввод" (рекомендуемый шаг 0,001). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания.Запишите значение граничного коэффициента  . Введите значение
. Введите значение  в поле . Настройка окончена.
в поле . Настройка окончена.
18 Нажмите кнопку "Пауза". Пользуясь методикой, описанной в разделе “Пример” главы 8.6Запуск программы и проведение лабораторных работ, определите время переходного процесса и перерегулирование.
19 Нажмите кнопку "Продолжить", и щелчком по кнопкамК1 и К2 разблокируйте МД1 и МД2.
20 Щелкнув по ключу К3, переведите его в положение "вниз", введя тем самым дополнительную инерционность в цепь якоря двигателя.Проведите настройку регуляторов методом Циглера – Николса.
21 Установите значения:  ; (Прег);
; (Прег);  (Ирег), и
(Ирег), и  (Дрег).
(Дрег).
22 Выполните пп.3-5 и убедитесь в колебательности объекта регулирования.
23 Установите значение  . Остальные коэффициенты остаются в прежних значениях: (Прег); (Ирег), и (Дрег).
. Остальные коэффициенты остаются в прежних значениях: (Прег); (Ирег), и (Дрег).
24 Выполните пп.3-4.
25 Не останавливая процесс, постепенно увеличивайте значение  . Для этого вводите все новые значения в поле и нажимайте на клавиатуре "Ввод" (рекомендуемый шаг 0.1). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания. Нажмите кнопку "Пауза".
. Для этого вводите все новые значения в поле и нажимайте на клавиатуре "Ввод" (рекомендуемый шаг 0.1). Увеличивайте до тех пор, пока не начнутся устойчивые автоколебания. Нажмите кнопку "Пауза".
26 По графику переходного процесса определите период автоколебаний  .
.
27 Нажмите кнопку "Продолжить", щелчком по кнопке К1 активизируйте управление МД1, и уменьшайте значение , пока колебания не примут затухающий характер. Нажмите кнопку "Пауза" и запишите значение граничного коэффициента  .
.
28 Используя полученные  и , по формуле (8) рассчитайте коэффициенты регуляторов для метода Циглера-Николса , ,
и , по формуле (8) рассчитайте коэффициенты регуляторов для метода Циглера-Николса , ,  (см. Табл.1) и введите их в соответствующие поля.
(см. Табл.1) и введите их в соответствующие поля.
29 Проделайте пп.3-5. Оцените параметры переходного процесса. Проверьте систему на изменение нагрузки (см. п.7 данной работы).
30 Для выхода из данной лабораторной работы нажмите кнопку "Выход".
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 448; Нарушение авторских прав?; Мы поможем в написании вашей работы!