КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 4.15
|
|
|
|
Примеры динамического исследования сложных систем
При изучении движения механической системы, как правило, необходимо использовать несколько теорем. Если система состоит из нескольких твердых тел, то в большинстве случаев оказывается удобным (а иногда необходимым) разделить систему на части, рассматривая движение каждого тела, входящего в систему, в отдельности.
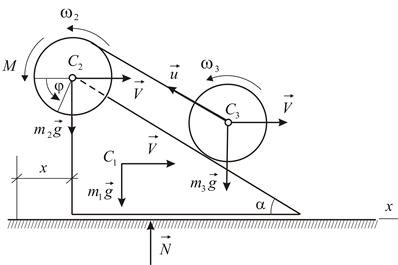
Призма (тело 1) массы  может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки (тело 2). Конец троса прикреплен к оси катка (тело 3), который катится без проскальзывания по боковой поверхности призмы (Рис. 4.15). Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы
может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки (тело 2). Конец троса прикреплен к оси катка (тело 3), который катится без проскальзывания по боковой поверхности призмы (Рис. 4.15). Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы  и одинакового радиуса
и одинакового радиуса  . К барабану лебедки приложен постоянный вращающий момент
. К барабану лебедки приложен постоянный вращающий момент  . Определить движение системы, если в начальный момент времени она находилась в покое.
. Определить движение системы, если в начальный момент времени она находилась в покое.
Система имеет две степени свободы. В качестве параметров, определяющих положение системы примем координату  призмы и угол поворота
призмы и угол поворота  барабана лебедки.
барабана лебедки.
|
| Рис. 4.15 |
Заметим, что внешние силы, приложенные к системе в целом, не имеют проекций на направление движения призмы (Рис. 4.15). Записывая теорему об изменении количества движения механической системы в проекциях на координатную ось ,
получаем:

где  – скорость призмы, а
– скорость призмы, а  – относительная скорость оси катка. Учитывая, что в начальный момент система находилась в покое,
– относительная скорость оси катка. Учитывая, что в начальный момент система находилась в покое,  получаем:
получаем:

| 
| |
| Рис. 4.16 | Рис. 4.17 |
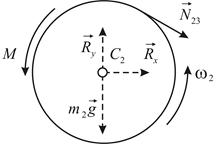
Дифференциальное уравнение вращательного движения для барабана лебедки имеет вид (Рис. 4.16):
или, учитывая, что  и
и 
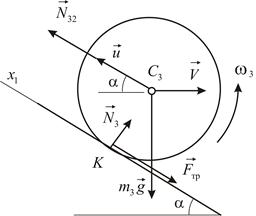
Для катка запишем теорему о движении центра масс в проекциях на направление оси  (вдоль наклонной плоскости) и дифференциальное уравнение вращения (Рис. 4.17):
(вдоль наклонной плоскости) и дифференциальное уравнение вращения (Рис. 4.17):

Точка  является мгновенным центром скоростей катка в его относительном движении. Учитывая, что
является мгновенным центром скоростей катка в его относительном движении. Учитывая, что  и
и  , получаем:
, получаем:

Исключая из системы уравнений  , силы
, силы  получаем:
получаем:

Это уравнение после интегрирования при нулевых начальных условиях принимает вид:

Задача свелась к решению системы уравнений  и
и  . Получаем:
. Получаем:
Пример 4.16
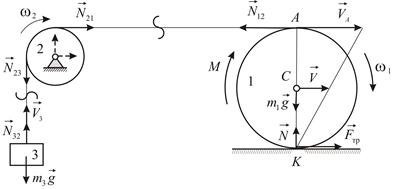
Каток массы радиуса  катится без скольжения по горизонтальной поверхности под действием приложенного к нему постоянного вращающего момента . Трос, намотанный на боковую поверхность катка, сходит с него горизонтально и попадает на неподвижный блок массы
катится без скольжения по горизонтальной поверхности под действием приложенного к нему постоянного вращающего момента . Трос, намотанный на боковую поверхность катка, сходит с него горизонтально и попадает на неподвижный блок массы  и радиуса
и радиуса  (Рис.4.18). К свободному концу троса привязан груз массы
(Рис.4.18). К свободному концу троса привязан груз массы  . Считая каток и блок сплошными однородными цилиндрами определить скорость оси катка
. Считая каток и блок сплошными однородными цилиндрами определить скорость оси катка  . если в начальный момент времени система находилась в покое.
. если в начальный момент времени система находилась в покое.
Рассматривая движение каждого из тел системы в отдельности, записываем: теорему о движении центра масс катка в проекциях на горизонтальное направление:
дифференциальное уравнение вращательного движения катка:
дифференциальное уравнение вращательного движения блока:
|
| Рис. 4.18 |
и теорему о движении центра масс груза в проекциях на вертикальное направление:
Учитывая очевидные кинематические соотношения:

а также тот факт, что

получаем дифференциальное уравнение:

интегрируя которое при нулевых начальных условиях, находим:
|
|
|
|
|
Дата добавления: 2014-12-25; Просмотров: 628; Нарушение авторских прав?; Мы поможем в написании вашей работы!