КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 3.41
|
|
|
|
У
В линейном случае базу правил модуля можно записать в виде R{k): IF(x., это А\ AND х2 это ^... AND xn это <)
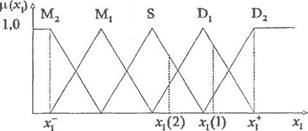
Рис. 3.36. Иллюстрация к примеру 3.41.
^(2) = 0,3, дд2(2) = 0,75, Агд|(3) = 0,2.
Если принять, что значения иА {к = 1, 2) рассчитываются при помощи операции типа min, то имеем
min(0,3; 0,7) = 0,3, min(0,75; 0,2) = 0,2. Кроме того,
1 = 7, y2=f2(2,3) = 11.
Если рассчитать значение у на выходе модуля нечеткого управления по формуле (3.277), то получим
 для к= 1,..., /V.
для к= 1,..., /V.
Рассмотрим модуль управленияТакаги-Сугено с двумя правилами
R(1): ^(х! это большое AND x2 это среднее)
THEN У! =2 + 7х.,-Зх2,
R(2): IF(x-| это малое AND x2 это малое)
THENy2 =-2x^5x2
Определим его выходной сигнал у для х^ 2 и х2= 3. С учетом графиков на рис. 3.36 получаем
w1 +w2
3.10. Проектирование базы нечетких правил на основе численных данных
При решении большинства прикладных задач регулирования информацию, необходимую для построения и реализации системы управления, можно разделить на две части: численную (количественную), получаемую с измерительных датчиков, и лингвистическую (качественную), поступающую от эксперта. Значительная часть нечетких систем регулирования использует второй вид знаний, чаще всего представляемых в форме базы нечетких правил.
В случае, когда возникает необходимость спроектировать нечеткую систему, но в наличии имеются только численные данные, мы сталкиваемся с серьезными проблемами. Одним из путей их разрешения счи-
Глава 3. Нечеткие множества и нечеткий вывод
3.10. Проектирование базы нечетких правил на основе численных банных 111
 |  |
|
| 0,0 |
| М3 М2 М, S Dt D2 D3 |
таются так называемые нейро-нечеткие (fuzzy-neural) системы, представленные в главе 5. Они обладают многими достоинствами, однако сдерживающим моментом является длительность наполнения их знаниями (построения базы правил) в процессе итеративного обучения. Далее излагается один из простейших, но в то же время весьма универсальный метод построения базы нечетких правил на основе численных данных [30, 31]. Достоинства этого метода заключаются в его необычайной простоте и очень высокой эффективности. Кроме того, он позволяет объединять численную информацию, представленную в форме обучающих данных, с лингвистической информацией, имеющей вид базы правил, за счет дополнения имеющейся базы правилами, созданными на основе численных данных.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 369; Нарушение авторских прав?; Мы поможем в написании вашей работы!