КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Упражнения 6.1
|
|
|
|
- Сложите две пары сил путём сложения векторов сил, образующих эти пары, если пары сил расположены
- в одной плоскости;
- в пересекающихся плоскостях.
Указание. Приведите складываемые пары сил к одному плечу.
- Покажите, что сумма моментов сил (
 ,
,  , ( = - ) и
, ( = - ) и  , (
, ( )), образующих пары, относительно любого центра, равна сумме векторов моментов исходных пар сил:
)), образующих пары, относительно любого центра, равна сумме векторов моментов исходных пар сил:  , Рис.19*.
, Рис.19*.
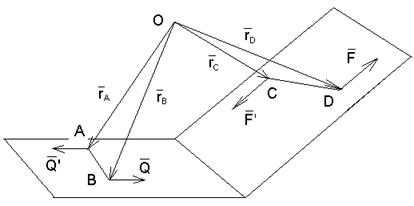 Рис. 19*.
Рис. 19*.
6. Уточнённое определение моментного воздействия одного тела на другое.
 Как было показано в Разделе 1, воздействие одного тела на другое в общем случае характеризуется силой и моментом, который для наглядности был представлен парой сил. Это подтверждается Рис.7, на котором показано воздействие жёсткой стены на замурованный
Как было показано в Разделе 1, воздействие одного тела на другое в общем случае характеризуется силой и моментом, который для наглядности был представлен парой сил. Это подтверждается Рис.7, на котором показано воздействие жёсткой стены на замурованный
в неё стержень.
При таком определении воздействия вращательный эффект действия одного тела на другое определяется только собственно моментом. Однако сила также стремится повернуть тело вокруг выбранного центра, если этот центр не лежит на линии действия силы. Рис.20. К определению момента
Поэтому следует уточнить определение моментного воздействия на тело
воздействия одного тела на другое.
Пусть воздействие тела В на тело А характеризуется силой  и парой сил с моментом
и парой сил с моментом  , Рис. 20. Моментом, действующим со стороны тела В на тело А и вычисленным относительно точки О, называется свободный аксиальный вектор, равный
, Рис. 20. Моментом, действующим со стороны тела В на тело А и вычисленным относительно точки О, называется свободный аксиальный вектор, равный
 . (1)
. (1)
Вектор  - свободный в том смысле, что где бы ни располагалась точка О, вектор момента относительно этой точки будет определяться формулой (1).
- свободный в том смысле, что где бы ни располагалась точка О, вектор момента относительно этой точки будет определяться формулой (1).
В [2] точка О названа опорной, а точка Р - точкой приведения; вектор назван собственно моментом. Если =  , а
, а  то
то
воздействие на тело А - чисто силовое; если = , а то воздействие на тело А - чисто моментное.
Из формулы (1) видно, что в общем случаемоментная часть воздействия тела В на тело А создаётся не только собственно моментом ,но и силой .
И только в случае выбора точки О на линии действия силы моментное воздействие на тела В на тело А сводится только к собственно моменту . Опорная точка О - любая точка тела, поэтому - свободный вектор, не привязанный ни к какой конкретной точке.
Точка приведения Р выбирается произвольно. На Рис.7 она совпадает с точкой А.
При определении моментного воздействия тела В на тело А точка приведения должна быть жёстко связана с телом А. Тело А при этом поворачивают (или стремятся повернуть) на бесконечно малый угол именно вокруг точки приведения Р, точнее вокруг всевозможных осей, проходящих через эту точку. Если тело В сопротивляется этому повороту, то собственно момент не равен нулю. Если существует ось, проходящая через точку Р, такая, что тело В не препятствует повороту тела А вокруг этой оси, то проекция вектора на эту ось равна нулю.
Относительно опорной точки определяется суммарное моментное воздействие на тело А его окружения (см. Раздел 8).
Сила и момент называются воздействием тела В
на тело А. При такой количественной оценке механического взаимодействия тел сила и момент - свободные векторы. Это определение воздействия уточняет ранее данное его определение (см. Раздел 1).
Воздействие тела В на тело А называется чисто силовым, если существует такая точка приведения Р, что воздействие тела В на тело А определяется двумя векторами  Точка Р в этом случае называется центром силового воздействия (но не точкой приложения силы , так как сила- свободный вектор, она не привязана ни к какой точке).
Точка Р в этом случае называется центром силового воздействия (но не точкой приложения силы , так как сила- свободный вектор, она не привязана ни к какой точке).
Принятый порядок решения задач статики предусматривает предварительное составление силовых схем. Сосредоточенные силовые воздействия окружающих тел на рассматриваемое тело А приложены в определённых точках тела А. Положение этих точек определяется схемой конструкции, частью которой является тело А, и заданными активными воздействиями на неё. Но после того, как для каждого тела B, взаимодействующего с телом А, введены количественные оценки его воздействия на тело А в виде силы и момента:  , сила
, сила  и момент становятся свободными векторами.
и момент становятся свободными векторами.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 536; Нарушение авторских прав?; Мы поможем в написании вашей работы!