КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналитические выражения для моментов силы относительно осей системы координат
|
|
|
|
Для правила сложения моментов сил различают два случая
1. Моменты сил лежат в одной плоскости, оси вращения параллельны. Их сумма определяется путем алгебраического сложения. Правовинтовые моменты входят в сумму со знаком минус. Левовинтовые — со знаком плюс
2. Моменты сил лежат в разных плоскостях, оси вращения не параллельны. Сумма моментов определяется путем геометрического сложения векторов.
Из-за важности вычисления моментов относительно осей системы координат рассмотрим, как их можно вычислить аналитически.
Для получения этих выражений используем формулу (1). Вводим систему координат с началом в центре - точке O. Выражаем вектор-момент относительно центра в проекциях на оси введенной системы координат OXYZ. Учитывая, что проекции радиус-вектора на оси координат являются координатами точки приложения силы, раскрываем определитель векторного произведения, элементами которого являются единичные векторы и проекции векторов на оси координат:

Выражения перед единичными векторами являются проекциями вектора-момента на оси координат. Учитывая выражения (8), получаем аналитические выражения для моментов силы относительно осей системы координат OXYZ:

| (9) |
В заключение параграфа еще раз подчеркнем, что момент силы физически отражает возможность силы поворачивать твердое тело, а математически, как оказалось, определяет линию действия силы самым удобным для практического применения способом. Иными словами, в общем случае, изучая действие сил на твердое тело, нужно, как с физической, так и с математической точки зрения учитывать не только сами силы, но и моменты этих сил.
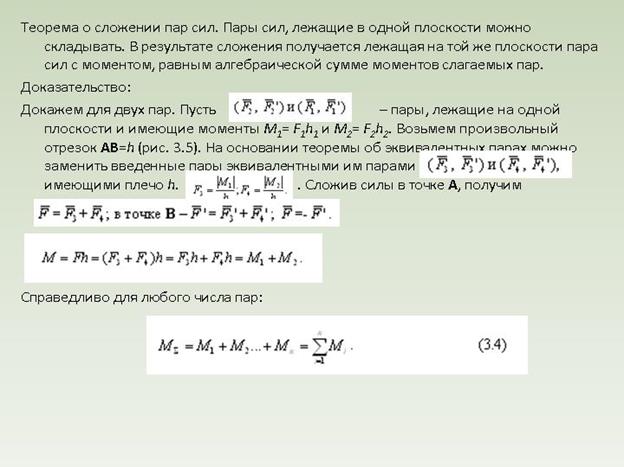
10.Сложение ПАР сил.Условия равновесия пар сил.
Системой пар сил является совокупность пар сил, приложенных к одному телу.
Сложение пар сил. Система пар сил эквивалентна одной паре, момент которой равен сумме моментов пар, образующих систему:
| (8) |
где M1 = M(F1,F1'), M2 = M(F2,F2'),..., Mn = M(Fn,Fn'). 
На рис. 25, a представлена исходная система пар сил. По второму свойству заменяем пары их моментами и переносим моменты пар, как свободные векторы, в одну произвольную точку (рис. 25, b). По правилу параллелограмма мы складываем векторы моментов пар и получаем второе выражение в (8). Одному моменту пары M соответствует одна пара сил (F,F') и M = M(F,F') (рис. 25, c).
Если все пары лежат в одной плоскости, векторное суммирование моментов пар теряет смысл. Поэтому мы используем алгебраические моменты пар сил и получаем

| (9) |
Равновесие системы пар. Вначале сформулируем, а затем докажем условие равновесия для системы пар сил.
Для равновесия твердого тела под действием системы пар сил необходимо и достаточно, чтобы геометрическая сумма моментов пар, образующих систему, была равна нулю:

| (10) |
Необходимость условия сразу следует из (8). Если M = 0, то (F,F') ~ 0 и, следовательно, ((F1,F'1), (F2,F'2),..., (Fn,F'n)) ~ 0. Достаточность условия докажем методом от противного. Предположим, что условие (10) не выполняется и M  0, а твердое тело находится в равновесии. В этом случае система пар сил приводится к одной паре (F,F') и тело в равновесии находиться не может. Таким образом, наше предположение не верно, а условие (10) является верным, и его достаточность доказана.
0, а твердое тело находится в равновесии. В этом случае система пар сил приводится к одной паре (F,F') и тело в равновесии находиться не может. Таким образом, наше предположение не верно, а условие (10) является верным, и его достаточность доказана.
Необходимым и достаточным условием равновесия системы пар, лежащих в одной плоскости, является равенство нулю алгебраической суммы моментов всех пар системы:
| (11) |
Таким образом, в этом параграфе мы рассмотрели пару сил, являющуюся, как и сила, самостоятельным элементом статики, изучили свойства пары сил, эквивалентность пар, сложение и условия равновесия для системы пар сил.
11. Момент пары сил
Вектор момента пары сил  направлен перпендикулярно плоскости действия пары сил в ту сторону, откуда вращение тела парой сил наблюдается происходящим против часовой стрелки (рис. 2.2).
направлен перпендикулярно плоскости действия пары сил в ту сторону, откуда вращение тела парой сил наблюдается происходящим против часовой стрелки (рис. 2.2).
Модуль момента пары сил равен произведению модуля одной из сил пары на ее плечо, т. е.  .
.
 Рис. 2.2. Момент пары сил Рис. 2.2. Момент пары сил
|  Рис. 2.3. Проекции векторного момента пары сил на оси координат Рис. 2.3. Проекции векторного момента пары сил на оси координат
| 
|
Векторный момент  пары сил, произвольно расположенный в декартовой системе координат
пары сил, произвольно расположенный в декартовой системе координат  , может быть представлен в разложении по этим осям координат (рис. 2.3),
, может быть представлен в разложении по этим осям координат (рис. 2.3),  , где
, где 
 – проекции векторного момента
– проекции векторного момента  на соответствующие оси координат.
на соответствующие оси координат.
Векторный момент пары сил, расположенный в одной из координатных плоскостей, или ей параллельной, следует приложить в центре  , направив вдоль соответствующей оси в сторону, откуда вращение тела парой сил представляется против часовой стрелки (рис. 2.4). Так
, направив вдоль соответствующей оси в сторону, откуда вращение тела парой сил представляется против часовой стрелки (рис. 2.4). Так 

 , где
, где 

 – модули моментов соответствующих пар сил.
– модули моментов соответствующих пар сил.
Известно, что пару сил можно как угодно поворачивать и переносить в плоскости ее действия; от этого действие пары сил на твердое тело не изменяется, если алгебраический момент пары сил остается таким же. Следовательно, векторный момент пары сил можно переносить параллельно самому себе в любую точку твердого тела, лежащую в плоскости действия пары сил. Так как к тому же пару сил можно переносить в параллельную плоскость, то векторный момент пары сил можно переносить параллельно самому себе в любую точку тела, не изменяя действия пары сил на твердое тело. [2]
Если на тело действуют несколько пар сил и эти пары лежат в одной плоскости, то векторы моментов пар параллельны и вместо них можно рассматривать алгебраические моменты. Алгебраический момент пары сил равен взятому с определенным знаком произведению модуля одной из сил пары на ее плечо. [3]
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1357; Нарушение авторских прав?; Мы поможем в написании вашей работы!