КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основная теорема статики
|
|
|
|
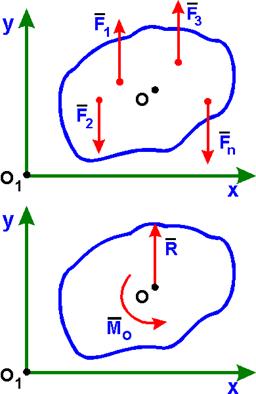
Пусть дана произвольная система сил (F1, F2,..., Fn). Сумму этих сил F=åFk называют главным вектором системы сил. Сумму моментов сил относительно какого-либо полюса называют главным моментом рассматриваемой системы сил относительно этого полюса.
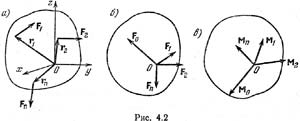
Осн теор статики (теорема Пуансо): Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения. Пусть О — центр приведения, принимаемый за начало координат, r1,r2, r3,…, rn–соответствующие радиусы-векторы точек приложения сил F1, F2, F3,...,Fn, составляющих данную систему сил (рис. 4.2, а). Перенесем силы F1, Fa, F3,..., Fn в точку О. Сложим эти силы как сходящиеся; получим одну силу: Fо=F1+F2+…+Fn=åFk, которая равна главному вектору (рис. 4.2, б). Но при последовательном переносе сил F1, F2,..., Fn в точку О мы получаем каждый раз соответствующую пару сил (F1, F”1), (F2,F”2),...,(Fn, F"n).Моменты этих пар соответственно равны моментам данных сил относительно точки О: М1=М(F1,F”1)=r1 x F1=Мо(F1), М2=М(F2, F”2)=r2 x F2=Мо(F2), …, Мп=М(Fn, F"n)=rn x Fn=Мо(Fn). На основании правила приведения системы пар к простейшему виду все указанные пары можно заменить одной парой. Ее момент равен сумме моментов всех сил системы относительно точки О, т. е. равен главному моменту, так как согласно формулам (3.18) и (4.1) имеем (рис. 4.2, в) М0=М1+М2+...+Мn=Мо(F1)+Мо(F2)+…+ Мо(Fn)==åМо(Fk)=årk x Fk. Систему сил, как угодно расположенных в пространстве, можно в произвольно выбранном центре приведения заменить силой Fo=åFk (4.2) и парой сил с моментом M0=åM0(Fk)=årk x Fk. (4.3). В технике очень часто проще задать не силу или пару, а их моменты. Например, в характеристику электромотора входит не сила, с которой статор действует на ротор, а вращающий момент.
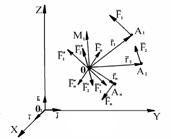
16/18. Приведение произвольной пространственной системы сил к данному центру. Главный вектор и главный момент. Систему сил, приложенных к телу, можно упростить, используя теорему о параллельном переносе силы. В результате приведения произвольной пространственной системы сил к данному центру в общем случае получаем главный вектор, равный геометрической сум-ме всех сил системы, и главный момент, равный геометрической сумме момен-тов всех приводимых сил относительно центра приведения (рис. 1.33).
Сложим  и т.д., получим силовой многоугольник, где
и т.д., получим силовой многоугольник, где
 (1.15)
(1.15)
Затем векторно сложим векторы моментов
 (1.16)
(1.16)
;  (1.17)
(1.17)
 Главный вектор инвариантен по отношению к центру приведения. Главный момент зависит от вы-бора центра приведения. По модулю главный вектор вычисляется
Главный вектор инвариантен по отношению к центру приведения. Главный момент зависит от вы-бора центра приведения. По модулю главный вектор вычисляется
R*=  (1.18)
(1.18)
Рис. 1.33
где

проекции главного вектора на координатные оси  *(Rx, Ry, Rz), а проекции каждой из сил
*(Rx, Ry, Rz), а проекции каждой из сил  (X1, Y1, Z1),
(X1, Y1, Z1),  (X2, Y2, Z2) и т.д.
(X2, Y2, Z2) и т.д.
Направление находим по направляющим косинусам

Главный момент 

Для равновесия произвольной пространственной системы сил необходимо и дос-таточно, чтобы алгебраическая сумма проекций всех этих сил на каждую из коор-динатных осей равнялась нулю, и чтобы алгебраическая сумма моментов всех сил системы относительно каждой из трех координатных осей равнялась нулю.

Система параллельных сил. Если ось OZ параллельна силам, то три уравнения (1.23) обращаются в тождества, так как проекции сил на оси OX и OY и их моменты относительно оси OZ равны нулю. Оставшиеся три уравнения явля-ются уравнениями равновесия параллельных сил в пространстве (рис. 1.34).

Для параллельных сил расположенных в плоскости XOY (рис. 1.35), имеем два уравнения равновесия:
 (1.25)
(1.25)
17./18 Плоская система произвольно расположенных сил. Если силы дейст-вуют в плоскости XOY (рис. 1.36), то суммы проекций их на ось OZ и моментов относительно осей OX и OY равны нулю. При равновесии тела под действием плоской системы сил суммы их про-екций на оси координат и сумма моментов относительно произвольного центра, лежащего в плоскости сил, равны нулю

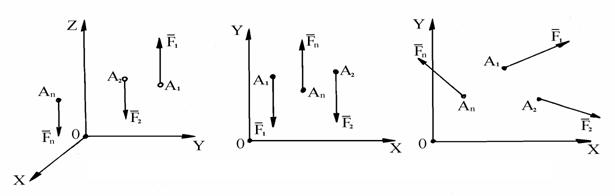
Рис. 1.34 Рис. 1.35 Рис. 1.36 Примеры упрощения системы сил, действующих на самолет. Силы взаимодействия самолета с поверхностью взлетно-посадочной полосы (ВПП) и воздухом при движении по земле и в полете подчиняются сложным закономер-ностям. Во всех случаях систему сил, действующих на самолет, упрощают. На-пример, воздушное давление, неравномерно распределенное по нижней и верх-ней поверхностям крыла (или стабилизатора, киля), часто суммируют и относят к одной поверхности. Силы, действующие на самолет в горизонтальном полете с постоянной скоростью без бокового ветра, могут быть приведены к плоской системе сил (рис. 1.37).

Рис.
1.37
Вес самолета  , подъемная сила крыла
, подъемная сила крыла  и горизонтального оперения
и горизонтального оперения  , тяга двигателей
, тяга двигателей  и сила лобового сопротивления
и сила лобового сопротивления  удовлетворяют трем уравнениям равновесия:
удовлетворяют трем уравнениям равновесия:
1) условие сохранения постоянной скорости
 (1.27)
(1.27)
2) условие сохранения постоянной высоты
 (1.28)
(1.28)
3) условие сохранения горизонтального положения самолета
 (1.29)
(1.29)
20. Параллельные силы
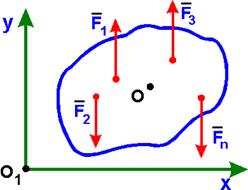
 Система сил F1, F2,..., Fn, лежащих в одной плоскости, линии действия которых параллельны друг другу, называется плоской системой параллельных сил.
Система сил F1, F2,..., Fn, лежащих в одной плоскости, линии действия которых параллельны друг другу, называется плоской системой параллельных сил.
При приведении этой системы сил к произвольному центру (точке) О получим главный вектор R, приложенный в точке О, и пару сил с моментом Mo.
Главный вектор R системы параллельных сил параллелен силам, его модуль равен абсолютномузначению алгебраической суммы проекций сил на ось (О1у), параллельную силам, а его направление определяется знаком этой суммы:
| R | = | Ry | = |S± Fk |. (k = 1, 2,..., n)
Момент пары сил Mo равен главному моменту параллельных сил F1, F2,..., Fn относительно центра приведения О:
Mo = S mo(Fk). (k = 1, 2,..., n)
Условия равновесия для плоской системы параллельных силимеют вид:
| R = 0, Mo = 0. |
Из них следуют две формы аналитических условий равновесия для системы параллельных сил на плоскости.
1. Основная форма условий равновесия.
| S Fky = S±Fky = 0, S mo(Fk) = 0. (k = 1, 2,..., n) |
 для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы сумма проекций сил на ось, параллельную силам, и сумма их моментов относительно точки, лежащей на плоскости действия сил, были равны нулю.
для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы сумма проекций сил на ось, параллельную силам, и сумма их моментов относительно точки, лежащей на плоскости действия сил, были равны нулю.
2. Вторая форма условий равновесия:
| S mА(Fk) = 0, S mВ(Fk) = 0. (k = 1, 2,..., n) |
 Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых двух точек А и В (причем прямая АВ не параллельна силам), были равны нулю.
Для равновесия плоской системы параллельных сил необходимо и достаточно, чтобы суммы моментов всех сил относительно любых двух точек А и В (причем прямая АВ не параллельна силам), были равны нулю.
Для плоской системы параллельных сил каждая форма содержит два уравнения равновесия.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 3637; Нарушение авторских прав?; Мы поможем в написании вашей работы!