КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Скорости и ускорения точек тела
|
|
|
|
Рассмотрим скорости и ускорения точек тела, движущегося вокруг неподвижной точки. Так как при этом движении в каждый момент времени тело имеет мгновенную ось вращения ОР, вокруг которой происходит поворот с угловой скоростью  (рис. 4.5), то
(рис. 4.5), то
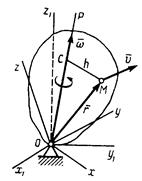
Рисунок 4.5
вектор скорости какой-нибудь точки М тела будет определяться равенством
 , ,
| (60) |
где  - радиус-вектор, проведенный в точку М из неподвижной точки О. Направлен вектор
- радиус-вектор, проведенный в точку М из неподвижной точки О. Направлен вектор  перпендикулярно плоскости МОР, проходящей через точку М и ось ОР в сторону поворота тела, т.е. куда указывает стрелка
перпендикулярно плоскости МОР, проходящей через точку М и ось ОР в сторону поворота тела, т.е. куда указывает стрелка  . Численно
. Численно
 , ,
| (61) |
где h=MC – расстояние точки М до мгновенной оси вращения тела ОР, вдоль которой направлен вектор .
Геометрически скорость любой точки М тела в данный момент времени можно найти, зная в этот момент скорость  какой-нибудь точки А тела и направление скорости
какой-нибудь точки А тела и направление скорости  другой точки В этого тела. Пусть и направление известны. Проведем тогда через точку А плоскость 1, перпендикулярную вектору . Как показано (рис. 4.6), мгновенная ось ОР должна лежать в этой плоскости. Но одновременно ось
другой точки В этого тела. Пусть и направление известны. Проведем тогда через точку А плоскость 1, перпендикулярную вектору . Как показано (рис. 4.6), мгновенная ось ОР должна лежать в этой плоскости. Но одновременно ось  ОР должна лежать в плоскости 2, проведенной через точку В перпендикулярно вектору . Следовательно, прямая, по которой пересекутся эти плоскости, и будет мгновенной осью вращения ОР. Теперь, определив расстояние h точки А от оси ОР, по формуле
ОР должна лежать в плоскости 2, проведенной через точку В перпендикулярно вектору . Следовательно, прямая, по которой пересекутся эти плоскости, и будет мгновенной осью вращения ОР. Теперь, определив расстояние h точки А от оси ОР, по формуле  найдем угловую скорость тела в данный момент вре-
найдем угловую скорость тела в данный момент вре-
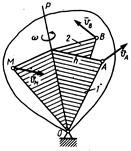
Рисунок 4.6
мени:  . После этого значение скорости
. После этого значение скорости  любой точки М тела находится по формуле
любой точки М тела находится по формуле  , а вектор
, а вектор  будет направлен перпендикулярно плоскости ОМР.
будет направлен перпендикулярно плоскости ОМР.
В частном случае, когда известно, что скорость какой-то точки тела равна в данный момент времени нулю, прямая, проходящая через эту точку и неподвижную точку О тела, будет мгновенной осью вращения и расчет существенно сократится.
Аналитически скорость определяется по ее проекциям на какие-нибудь координатные оси. Найдем проекции вектора на оси Oxyz, жестко связанные с телом и движущиеся с ним (см. рис. 4.4); эти оси имеют то преимущество, что в них координаты x, y, z точки М будут величинами постоянными. Так как  , то
, то
=  .
.
Отсюда, разлагая определитель по элементам первой строки и учитывая, что  и что, следовательно, коэффициенты при
и что, следовательно, коэффициенты при  в этом разложении должны равняться
в этом разложении должны равняться  соответственно, получим
соответственно, получим
| 
|
Эти формулы, как и формула (60), называют формулами Эйлера.
В частном случае формулы (62), конечно справедливы и при вращательном движении тела вокруг неподвижной оси z. Так как при этом  и
и  , то для такого случая
, то для такого случая
 .
.
Вектор ускорения точки М определим как производную вектора скорости по времени, т.е. дифференцируя по времени равенство  ; в результате чего получим
; в результате чего получим  . Так как
. Так как  =
=  , а
, а  , то окончательно
, то окончательно
 . .
| (63) |
Первое слагаемое этого равенства называют вращательной составляющей ускорения, обозначим её 
 . Вектор
. Вектор  направлен перпендикулярно плоскости, проходящей через точку М и вектор
направлен перпендикулярно плоскости, проходящей через точку М и вектор  (рис. 4.7), в ту сторону, куда указывает дуговая стрелка
(рис. 4.7), в ту сторону, куда указывает дуговая стрелка  ,
,
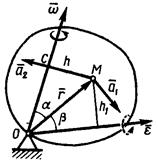
Рисунок 4.7
а по модулю
 ,
,
где  - расстояние от точки М до вектора .
- расстояние от точки М до вектора .
Второе слагаемое  называют осестремительной составляющей ускорения, обозначим её
называют осестремительной составляющей ускорения, обозначим её 
 . Вектор
. Вектор  направлен как вектор векторного произведения векторов (т.е. перпендикулярно одновременно двум векторам – и , и ), что дает направление вдоль МС, т.е. по перпендикуляру, опущенному из точки М на мгновенную ось вращения ОР, вдоль которой направлен вектор . По модулю
направлен как вектор векторного произведения векторов (т.е. перпендикулярно одновременно двум векторам – и , и ), что дает направление вдоль МС, т.е. по перпендикуляру, опущенному из точки М на мгновенную ось вращения ОР, вдоль которой направлен вектор . По модулю  ^
^  , так как .
, так как .
Заметим, что в отличие от результатов, полученных для вращающегося тела, здесь (при сферическом движении тела) не будет вектором касательного ускорения точки М (по касательной направлен вектор , а направление вектора будет вообще другим); следовательно, и вектор не будет вектором нормального ускорения точки М.
Таким образом, формула (63) примет вид
 .
.
Это равенство выражает теорему Ривальса об ускорении точки тела, совершающего сферическое движение: ускорение точки тела, вращающегося вокруг неподвижной точки, равно векторной сумме вращательного и осестремительного ускорений.
В общем случае вращательное и осестремительное ускорения не перпендикулярны друг другу, следовательно, модуль ускорения точки, как диагонали параллелограмма ускорений, вычисляют по формуле
 .
.
|
|
|
|
|
Дата добавления: 2015-06-27; Просмотров: 447; Нарушение авторских прав?; Мы поможем в написании вашей работы!