КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгоритм стандартного ПИД – регулирования
|
|
|
|
контроллера серии “Ремиконт”
Внутри алгоритма все величины выражены в % за исключением коэффициентов с  до
до .
.
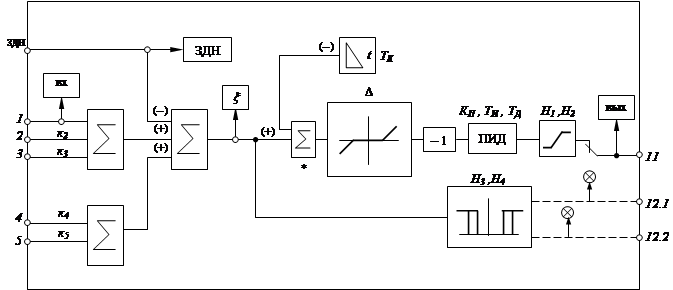
На вход ЗДН поступает задание регулируемой величины. На вход 1 сигнал поступает без искажения, на остальных входах сигнал может быть отмасштабирован:  ;
;  . На общем сумматоре рассчитывается величина рассогласования. Блок с
. На общем сумматоре рассчитывается величина рассогласования. Блок с  называется блоком компенсации.
называется блоком компенсации.
После сумматора * выходит действительная величина рассогласования и попадает на блок (зона нечувствительности) с настроечным коэффициентом D.
В САР имеют место случайные помехи, от которых можно защитить блок регулирования, введя зону изменения входного сигнала, в которой не будет ответной реакции на выходе.
Блок [-1] – это инверсия рассогласования. Инверсия служит для того, чтобы была отрицательная обратная связь.
Блок ПИД – регулирование с настроечными коэффициентами:  – коэффициент усиления,
– коэффициент усиления,  – время интегрирования,
– время интегрирования,  – время дифференцирования.
– время дифференцирования.
Следующий блок – ограничение амплитуды выходного сигнала:  – нижний порог,
– нижний порог,  – верхний порог.
– верхний порог.
Линейный диапазон работы регулирующих органов: от 15–30 % до 70–80 %.
Последний блок – гальваническая развязка: 11 – аналоговый выход, 12 – дискретный выход.
Автоматическая настройка регуляторов
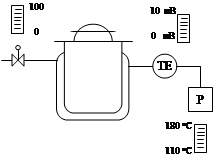
Рассмотрим на примере Т – 424 – регулятор микропроцессорный универсальный. Изготовитель НПФ КонтрАвт (Нижний Новгород).
 Автоматическая настройка является сервисной функцией, существует во всех новых регуляторах и служит для быстрой предварительной настройки параметров.
Автоматическая настройка является сервисной функцией, существует во всех новых регуляторах и служит для быстрой предварительной настройки параметров.
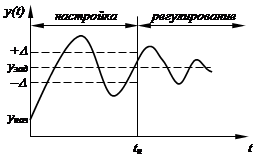
 В режиме настройки блок регулятора выполняет двухпозиционное регулирование (вкл./выкл.).
В режиме настройки блок регулятора выполняет двухпозиционное регулирование (вкл./выкл.).
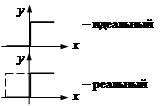
Статическая характеристика такого процесса:
По колебаниям выходного параметра с помощью инженерных формул, заложенных в регулятор, рассчитываются параметры настройки, и после этого регулятор автоматически переходит в режим ПИД – регулирования. Длительность настройки – один период колебания в системе.
Найденные таким образом настройки сохраняются в энергозависимой памяти и при необходимости могут быть скорректированы вручную.
Виды запаздывания
1) переходное запаздывание:  – вызывается механическими и технологическими характеристиками объекта;
– вызывается механическими и технологическими характеристиками объекта;
2) передаточное запаздывание:  – это запаздывание передачи сигналов;
– это запаздывание передачи сигналов;
3) транспортное запаздывание:  – вызвано расстоянием между регулирующим органом и объектом.
– вызвано расстоянием между регулирующим органом и объектом.
2) и 3) – это “чистое” запаздывание.
Инженерные методы расчета настроек
Инженерные методы предполагают нахождение:
1. переходной характеристики объекта;
2. построение переходного процесса в замкнутой системе автоматического регулирования.
1. Чтобы снять переходную характеристику объекта необходимо:
a) изучить регламент технологического процесса: необходимо знать максимально возможные возмущения и брать наибольшую “разбежку”, которая не повлечет за собой нарушение регламента;
 от текущего параметра.
от текущего параметра.
b) по характеристике регулирующего органа нужно рассчитать пределы изменения входного параметра, которые не повлекут за собой проблемы;
 |
c) снять переходную характеристику, оценить время запаздывания и постоянную времени и классифицировать объект.
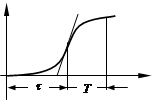 |
 – объект без самовыравнивания;
– объект без самовыравнивания;
 – объект с самовыравниванием.
– объект с самовыравниванием.
 – объект с самовыравниванием;
– объект с самовыравниванием;
 – объект без самовыравнивания.
– объект без самовыравнивания.
Формулы ВТИ им. Дзержинского
| параметр | характеристика | П | ПИ | ПИД |

| 
|
 –
–
–
–
|

 –
–
|



|

| 
|  –
–
–
–
|
 –
–
| 


|
|
| 
|
 –
–
–
–
|
 –
–
|


|
– степень неравномерности (диапазон дросселирования), величина, обратная коэффициенту усиления регулятора.
Формулы Ротача
2. Виды переходных процессов:
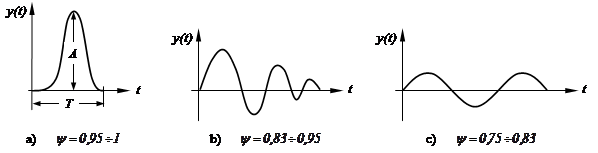 |
 – объект без самовыравнивания;
– объект без самовыравнивания;
 – объект с самовыравниванием.
– объект с самовыравниванием.

| 
| 
| ||

| 
|
|
| |
| 0,1 0,15 0,2 0,3 0,4 0,5 | 0,1 0,16 0,205 0,295 0,385 0,49 | 3,8 3,6 3,3 2,9 2,6 2,3 | 0,14 0,24 0,33 0,53 0,77 | 3,3 2,75 2,3 1,85 1,6 |
|
|
|
|
|
Дата добавления: 2014-10-22; Просмотров: 513; Нарушение авторских прав?; Мы поможем в написании вашей работы!