КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение реакций опор. Основные положения строительной механики
|
|
|
|
Основные положения строительной механики
Основные исходные положения строительной механики при решении задач упругого расчёта сооружений те же, что и сопротивления материалов:
1. Предположение об идеальной упругости материала элементов сооружения.
2. Применение линейной связи между напряжениями и деформациями (закон Гука).
3. Применение принципа независимости действия, согласно которому результат действия системы сил равен сумме результатов действия отдельных сил системы.
Этот принцип применим только к относительно жёстким сооружениям и использование его при расчёте гибких систем в области больших деформаций недопустимо.
4. При расчетах рассматривается исходная недеформированная система.
2. Расчёт плоских статически определимых стержневых систем
на неподвижную нагрузку
В данной главе рассматривается задача определения внутренних усилий в статически плоских определимых стержневых системах от заданной неподвижной нагрузки.
Алгоритм решения поставленной задачи для рассматриваемых систем включает:
· Кинематический анализ системы;
· Определение реакций опор;
· Определение внутренних усилий и построение при необходимости их эпюр;
· Подбор или проверку размеров поперечных сечений стержней.
Вопросы кинематического анализа стержневых систем рассмотрены в главе 1. Далее рассматриваются остальные этапы указанного алгоритма.
Для определения реакции опор от заданной нагрузки необходимо:
· Изобразить на расчётной схеме реакции опор или их составляющие;
· Наметить алгоритм расчёта для определения реакций опор;
· Задать правило знаков для записи уравнения равновесия;
· Записать уравнение равновесия;
· Определить реакции опор или их составляющие;
· Произвести проверку полученных результатов.
2.1.1 Типы опор и реакции опор.
Типы опор и реакции опор или их составляющие показаны на рис 2.1.
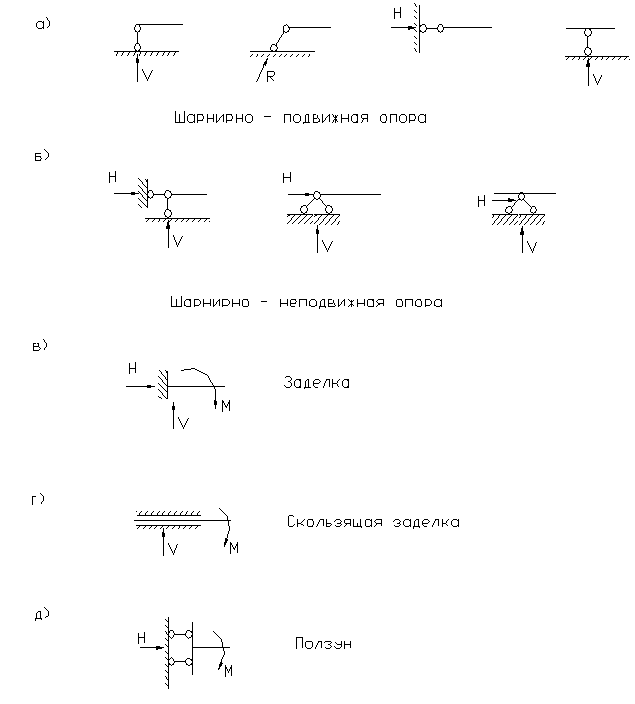
Рис. 2.1. Типы опор и реакции опор или их составляющие.
Необходимо отметить, что направление реакций опор или их составляющих, показанных на рис. 2.1, может быть изменено на противоположное.
Для краткости составляющие реакции опор будем называть реакциями опор.
2.1.2. Выбор алгоритма расчёта по определению реакции опор.
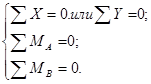
Для определения реакций опор плоской стержневой системы имеющей три опорных связи и, следовательно, три реакции опор используются три уравнения равновесия. Варианты уравнения равновесия показаны на рис. 2.2.
Вариант 1.

| Вариант 2.
| Вариант 3.

|
Рис. 2.2 Варианты систем уравнения равновесия
При записи уравнений равновесия на рис. 2.2 введены следующие обозначения:
 или
или  - алгебраическая сумма проекций заданной нагрузки и реакции опор соответственно на ось Х или Y;
- алгебраическая сумма проекций заданной нагрузки и реакции опор соответственно на ось Х или Y;
 - алгебраические суммы моментов от заданной нагрузки относительно точек А,В,С.
- алгебраические суммы моментов от заданной нагрузки относительно точек А,В,С.
Для определения реакций опор можно использовать любой из указанных вариантов систем уравнений равновесия, задавать произвольным образом направление взаимно перпендикулярных осей Х, Y; задавать произвольно положение точек А,В,С для записи уравнений моментов. Но при этом следует иметь ввиду, что от выбора варианта уравнений равновесия, системы координат ХY и положения точек А,В,С зависит сложность полученных уравнений равновесия и трудоёмкость решения системы уравнений.
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 2238; Нарушение авторских прав?; Мы поможем в написании вашей работы!